Download

1 / 40
430 likes | 1.05k Views
Elektronski fakultet Niš Katedra za elektroniku. UPRAVLJANJE STEP MOTORA PREKO MIKROKONTROLERA PIC16F877. Darko Radosavljević Miloš Marković 10948 10862. STEP MOTORI. jedini tip motor a kojim mikroprocesor može direktno upravljati

E N D
Elektronski fakultet NišKatedra zaelektroniku UPRAVLJANJE STEP MOTORA PREKO MIKROKONTROLERA PIC16F877 Darko Radosavljević Miloš Marković 10948 10862
STEP MOTORI • jedini tip motora kojim mikroprocesor može direktno upravljati • nalaze najveću moguću primenu u kompjuterskom upravljanu • karakteriše ih nisko napajanje kao i mala struja potrošnje • dovedeni impuls uzrokuje pomeranje za jedan korak
STEP MOTORI • dele se u dve grupe: unipolarni i bipolarni step motori • mogu da rade u tri različita režima: Monofaznom režimu rada Dvofaznom režimu rada Režimu polukoraka
šema interfejsa koji se priključuje na paralelni port PC računara (kolo UNL2003A)
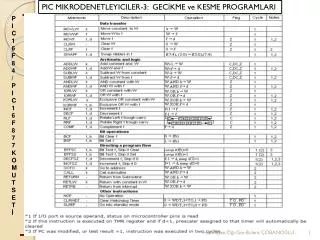
PIC16F877A – osnovne karakteristike 1/3 • RISC mikroprocesor visokih performansi • 35 instrukcija obima jedne reči • Radna frekvencija do 20 MHz • Trajanje taktnog intervala 200 ns, pri frekvenciji 20 MHz • Opkôd obima 14 bita • Harverski magacin sa osam nivoa • Tri načina adresiranja (direktno,indirektno i relativno) • Programska flash memorija kapaciteta 8 k X 14-bitnih reči • Memorije za podatke tipa RAM kapaciteta 368 X 8 bita • Memorije za podatke EEPROM tipa kapaciteta 256 X 8 bita • Prekidi (do 14 izvora prekida) • U/I portovi: A, B, C, D, E
PIC16F877A–osnovne karakteristike2/3 • Tri tajmera: - Timer0 (TMR0): 8-bitni tajmer/brojač_događaja - Timer1 (TMR1): 16-bitni tajmer/brojač_događaja - Timer2 (TMR2): 8-bitni tajmer/brojač_događaja • 10-bitni 8-kanalni analogno-digitalni (A/D) konvertor • Serijska komunikacija: MSSP, USART • Paralelna komunikacija: PSP • Power-on Reset - reset pri uključenju napajanja (POR) • Power-up timer - unošenje kašnjenja nakon uključenja napajanja (PWRT) • Oscillator Start-up Timer - unošenje kašnjenja nakon stabilizovanja radne frekvencije oscilatora (OST)
PIC16F877A–osnovne karakteristike3/3 • Sleep mode - režim rada sa malim utroškom energije • Watchdog tajmer sa sopstvenim integrisanim RC oscilatorom za nezavisan rad • Izbor tipa oscilatora • Radni napon od 2V do 5.5V • Mala potrošnja energije: • <0.6 mA pri naponu od 3V i radnoj frekvenciji od 4 MHz • 20µA pri naponu od 3V i radnom taktu od 32kHz • <1µA u standby režimu rada
PIC16F877A – izbor kristala kvarca ikeramičkih kondenzatora
Povezivanje uređaja na PC • Uređaj se povezuje na PC preko serijskog porta • Hyper terminal operativnog sistema Windows se koristi za komunikaciju uređaja i PC • Korisnik zadaje parametre: režim rada, smer okretanja i pauza između koraka
mikroC – softver za PIC mikrokontrolere • Kvalitetan editor sa automatskom kontrolom • Jasan asemblerski kôd i standardna kompatibilnost generisanih HEX datoteka • Preglednost strukture programa (kôda) • Veliki broj integrisanih biblioteka i rutina, koje značajno ubrzavaju pisanje programa • Detaljni izveštaji i grafičko predstavljanje mape RAM i • ROM memorija, statistike kôda i slično
mikroC – parametri UART terminala Parametri koji se podešavaju: • Serijski port (COM1, COM2, COM3) • Brzina prenosa • Broj stop bitova (1, 1.5 ili 2) • Izbor parnosti (bez, parna, neparna itd.) • Broj bitova koji čine karakter (5, 6, 7 ili 8) • Uključivanje/isključivanje handshaking signala (RTS i DTR) • Izbor formata podatka koji se šalje (ASCII, HEX ili DEC) • Način slanja.
Programiranje mikrokontrolera Za programiranjemikrokontrolera potrebni su • Bootstrap loader (na primer ALLPIC) i • Softver (na primer IC-Prog).
ALLPIC bootstrap loader • Jednostavan i jeftin (do 10 evra) • Pripada grupi JDM loadera • Programiranje preko serijskog porta.
IC Prog – softver za programiranje • Jednostavan za korišćenje • Kompatibilan sa 10-ak bootstrap loadera
Laboratorijska vežba 1/3 • Povezati sitem sa računarom preko serijskog porta (RS232) • Otvoriti komunikacioni terminal (Start>All Programs>Accessories>Communications>Hyper Terminal ) • U opciji Connect Using odabrati opciju željenog porta (COM 1).
Laboratorijska vežba 2/3 • Podesiti sledeće parametre porta: Bit per second : 9600, Data bits : 8, Parity : None, Stop bits : 1, Flow control : None.
Laboratorijska vežba 3/3 • Taster za restart na pločici pokreće aplikaciju • Parametri step motora se podešavaju u ranije opisanom terminalu • Kazaljka pokazuje kretanje motora: režim rada, smer okretanja i pauzu između koraka
Biografije autora - Darko Radosavljević 1/2 Ime i prezime : Darko Radosavljević Datum rodjenja : 04. jun 1983. Adresa : Stanoja Glavaša 2, 37000 Kruševac, Srbija Tel : 037/ 490 876 Mob : 064/16 33 230 e-mail : drmeca@gmail.com Bračno stanje: neoženjen
Biografije autora - Darko Radosavljević 2/2 Obrazovanje : Elektrotehnička škola Kruševac, „Elektrotehničar automatike“ 2002.god Elektronski fakultet u Nišu, smer Telekomunikacije, apsolvent Poznavanje jezika : Engleski (pisanje-odlično, čitanje-odlično, govor-odličan) Rad na računaru : MS Office Excel Internet Grafički programi (Photoshop, Corel Draw, Flash) Sopstvene veštine : Orjentisanost ka ostvarenju zadatih ciljeva, postavljanje prioriteta, preuzimanje problema na sebe i rešavanje istih,komunikativnost, kreativnost, inovacije, spremnost na saradnju i rad pod stresom. Ostalo : Vozačka dozvola B kategorije, aktivan vozač. Višegodišnje bavljenje vaterpolom
Biografije autora – Miloš Marković1/2 Ime i prezime : Miloš Marković Datum rodjenja : 16. decembar 1983. Adresa : Marka Jovanovića 22, 18000 Niš, Srbija Tel : 018/255 494 Mob : 063/523 999 e-mail : markovicmilos83@gmail.com Bračno stanje: neoženjen
Biografije autora – Miloš Marković2/2 Obrazovanje : Gimnazija „ Svetozar Marković“, Niš 2002.god Elektronski fakultet u Nišu, smer Telekomunikacije, apsolvent Poznavanje jezika : Engleski (pisanje-odlično, čitanje-odlično, govor-odličan) Rad na računaru : MS Office Internet Grafički programi (Photoshop, Corel Draw, Flash) Web design (HTML, Dreamweaver, Front Page) Osnove računarskih mreža ( Windows server 2003, osnove rutiranja) MatLab