Download
1 / 56
570 likes | 826 Views
GIS – SYSTEMY INFORMACJI GEOGRAFICZNEJ. MODEL RASTROWY DANYCH GIS. PLAN PREZENTACJI DANE RASTROWE RODZAJE DANYCH RASTROWYCH BUFOROWANIE WEKTOROWE, RASTROWE DRZEWA K-D WYZNACZANIE PRZECIĘĆ DWU POLIGONÓW SKŁADOWE SILNIKA WEKTOROWEGO SYSTEMU GIS INTERPOLACJA W MODELU NMT. DANE RASTROWE

E N D
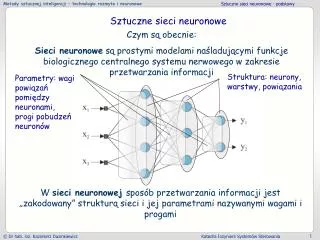
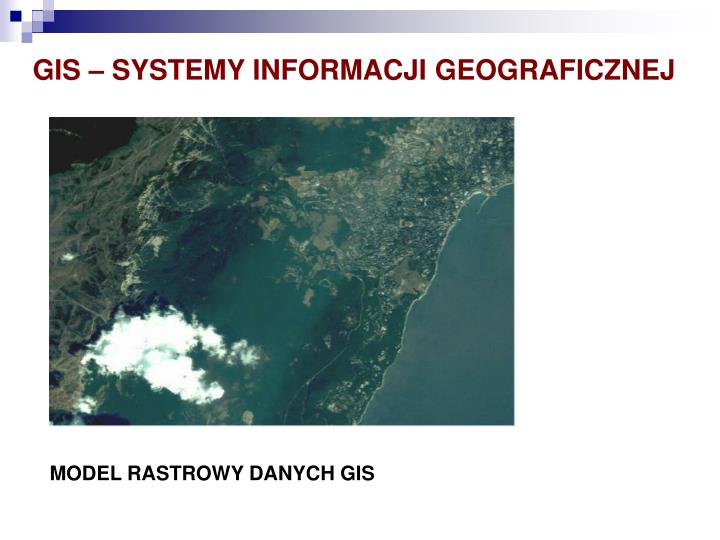
GIS – SYSTEMY INFORMACJI GEOGRAFICZNEJ MODEL RASTROWY DANYCH GIS
PLAN PREZENTACJI • DANE RASTROWE • RODZAJE DANYCH RASTROWYCH • BUFOROWANIE WEKTOROWE, RASTROWE • DRZEWA K-D • WYZNACZANIE PRZECIĘĆ DWU POLIGONÓW • SKŁADOWE SILNIKA WEKTOROWEGO SYSTEMU GIS • INTERPOLACJA W MODELU NMT
DANE RASTROWE Obrazy bitmapowe, zwane również rastrowymi, składają się z siatki czyli rastra małych kwadracików zwanych pikselami. Każdy piksel w obrazie bitmapowym ma swoje miejsce i kolor. Na przykład koło na rysunku obrazu bitmapowego jest zbiorem pikseli położonych w tym miejscu i zabarwionych tak, by sprawiały wrażenie koła. Pracując z obrazami bitmapowymi modyfikuje się grupy pikseli, a nie obiekty i kształty. DANE WEKTOROWE Grafika wektorowa składa się z linii prostych i krzywych, zdefiniowanych przez obiekty matematyczne wektory. Wektory opisują grafikę w kategoriach geometrycznych. Jeśli na przykład w programie wektorowym chce się narysować koło, program utworzy je na podstawie wzoru matematycznego opisującego kształt, rozmiar i położenie. Koło można następnie przesuwać oraz zmieniać jego wielkość i kolor, a grafika nie straci przy tym na jakości. Grafika wektorowa nie zależy od rozdzielczości, tzn. nie jest określana przez stałą liczbę pikseli i jest zawsze odtwarzana z maksymalną rozdzielczością dowolnego urządzenia wyjściowego.
ŹRÓDŁA DANYCH DLA SYSTEMÓW GIS: • •mapy analogowe; • •zdjęcia lotnicze; • •zdjęcia satelitarne; • •pomiary terenowe; • •bazy danych opisowych; • •inne bazy GIS.
MODEL RASTROWY • •reprezentacja cech o znacznej zmienności przestrzennej • •reprezentacja kontinuum –postulat wypełnienia przestrzeni • •rozmiar piksela vs. rozmiar rastra, zapis atrybutu (1 bajt, 2bajty...) • •łatwość przetworzeń: analiza otoczenia, filtracja, nakładanie warstw, gradienty
METODY TELEDETEKCJI I FOTOGRAMETRII Grupa metod określona jako metody fotogrametrii i teledetekcji dotyczygłównie pozyskiwania danych w postaci rastrowej. W przypadkufotogrametrii będzie touzyskiwanie zdjęć lotniczych czy ichprzetwarzanie do postaci ortofotomapy. Zawsze jednakbędzie chodziło o określenie położenia przestrzennego obiektów i ich kształtu z mniejszymprzywiązywaniem wagi do danych opisowych. Wteledetekcji jest odwrotnie, podstawoweznaczenie ma pozyskiwanie danych opisujących własności obiektów natomiast daneprzestrzennestanowią ich niezbędne uzupełnienie.
TELEDETEKCJA Teledetekcja to grupa metod służących do zdalnego określania obiektów powierzchniZiemi, ich natury i stanu, jak również do identyfikacji zjawisk zachodzących na jejpowierzchni. Dane teledetekcyjne pozyskiwane są za pośrednictwem sensorówumieszczonych na pokładach sztucznych satelitów lub samolotów. Sensory te mogąrejestrować emitowane lub odbite promieniowanie obiektów w zakresie spektralnym znacznieprzekraczającym przedział widzialności, co istotnie wpływa na wzbogacenie pozyskiwanejinformacji. W teledetekcji wyróżnia się cztery rodzaje rozdzielczości, charakteryzującesystemy teledetekcyjne: 1) rozdzielczość przestrzenna - określająca wielkość piksela 2) rozdzielczość spektralna - określa przedział rejestrowanego promieniowania 3) rozdzielczość radiometryczna - liczba rozróżnianych poziomów promieniowania 4) rozdzielczość czasowa - określa częstotliwość pozyskiwania danych i wyrażana jest przez czas obiegu w systemach satelitarnych Dane teledetekcyjne używane są z reguły w połączeniu z innymi danymi systemówinformacji przestrzennej dostarczając wielu informacji dodatkowych do zobrazowanych tamobiektów.
PRZYKŁADOWE PASMA ZOBRAZOWAŃ SATELITY LANDSAT
WARTOŚCI POSZCZEGÓLNYCH KOMÓREK Z ZOBRAZOWANIA Z SATELITY LANDSAT – PASMO RED
WARTOŚCI POSZCZEGÓLNYCH KOMÓREK Z ZOBRAZOWANIA Z SATELITY LANDSAT – PASMO GREEN
WARTOŚCI POSZCZEGÓLNYCH KOMÓREK Z ZOBRAZOWANIA Z SATELITY LANDSAT – PASMO BLUE
WARTOŚCI POSZCZEGÓLNYCH KOMÓREK Z ZOBRAZOWANIA Z SATELITY LANDSAT – PASMO INFRARED
NUMERYCZNY MODEL TERENU – NMT – DIGITAL TERRAIN MODEL Pod pojęciem numerycznego modelu terenu należy rozumieć zbiór odpowiednio zebranych punktów (określonych współrzędnymi X,Y,Z) powierzchni terenu wraz z algorytmem interpolującym, pozwalającym na określenie kształtu tej powierzchni bądź wysokości pojedynczych punktów. Najczęściej NMT tworzony jest w postaci regularnej siatki kwadratów (GRID) lub w postaci nieregularnej siatki trójkątów (TIN) NMT (DTM-DigitalTerrainModel) aproksymuje w postaci dyskretnej sieć punktów pomiarowych o znanych współrzędnych przestrzennych X, Y, Z funkcję ciągłą, jakąjest powierzchnia topograficzna terenu. W przypadku generowania z NMT warstwic, oprócz punktów pomiarowych nanosi się: •Linie szkieletowe, •Linie nieciągłości terenu, •Granice obszarów wydzielonych, •Pikiety wysokościowe usytuowane na punktach charakterystycznych terenu
NUMERYCZNY MODEL TERENU • Problematyka modelowania i prezentacji rzeźby terenu należy do podstawowych zagadnień zarówno tradycyjnej, jak i współczesnej kartografii. W 1866 r E. Sydow zdefiniował trzy podstawowe problemy kartografii związane • z odzwierciedleniem na płaszczyźnie sferoidalnej powierzchni Ziemi, • przedstawienie rzeźby terenu, • generalizacja kartograficzna. • Zagadnienia te nadal zaliczane są do podstawowych problemów. Szerokie wykorzystanie informacji cyfrowych zawartych w bazach danych przestrzennych oraz powszechne stosowanie narzędzi analitycznych GIS przyczynia się do konieczności ponownego zdefiniowania problematyki modelowania rzeźby terenu na różnych poziomach uogólnienia.
NUMERYCZNY MODEL TERENU Numeryczny model terenu (NMT) jest numeryczną, dyskretną (punktową) reprezentacją wysokości topograficznej powierzchni terenu, wraz z algorytmem interpolacyjnym umożliwiającym odtworzenie jej kształtu w określonym obszarze. W systemach komputerowych generowane są najczęściej dwa podstawowe typu NMT: regularny w postaci prostokątnej siatki punktów - GRID i nieregularny w postaci siatki trójkątów - TIN. Model GRID może być zarazem interpretowany jako swoista macierz wysokości, co znacząco ułatwia prowadzenie analiz przestrzennych. Model TIN powstaje w wyniku triangulacji spełniającej warunek Delaunay'a. Dobór punktów źródłowych do modelu TIN powinien być prowadzony zgodnie z zasadami próbkowania celowego, zapewniającego wybór punktów charakterystycznych, reprezentatywnych dla modelowanego obszaru. Generalizacja modelu rzeźby terenu (rozumiana jako generalizacja NMT, nie zaś uogólnienie rysunku warstwicowego) wiąże się zastosowaniem jednej z trzech metod: - filtracji globalnej, - filtracji lokalnej (z reguły wieloetapowej), - zastosowania podejścia heurystycznego
GENERALIZACJA NUMERYCZNEGO MODELU TERENU . Filtracja globalna polega na wyznaczeniu w każdym punkcie NMT wartości średniej ważonej, obliczanej w polu ruchomym o określonej wielkości. Liczba punktów modelu pozostaje stała, zmieniają się jedynie wartości poszczególnych punktów. Filtracja lokalna - generalizacja modelu realizowana jest przez selekcję punktów źródłowych.Metoda może być stosowana zarówno dla numerycznego modelu terenu w postaci TIN jak i GRID. W podejściu tym liczba punktów wyznaczających model ulega zmniejszeniu (możliwa jest oczywiście późniejsza liniowa rekompozycja modelu do początkowej rozdzielczości przestrzennej). Z modelu źródłowego usuwane są (z reguły iteracyjnie) punkty o małej istotności.). Podejście heurystyczne oparte jest na koncepcji generalizacji linii strukturalnych terenu. Metoda może być stosowana zarówno do uogólniania numerycznego modelu terenu w postaci TIN jak i GRID. Generalizacja jest oparta na uogólnianiu źródłowego modelu linii strukturalnych - SLM (structure line model) poprzez zastosowanie klasycznych operatorów generalizacji: przewiększania, usuwania, łączenia, uproszczenia itp. poszczególnych linii strukturalnych i następnie, na podstawie wynikowego SLM, rekompozycji wtórnego modelu NMT. Metoda ta stosowana jest wyłącznie do generalizacji modelu kartograficznego (DCM).
GENERALIZACJA NUMERYCZNEGO MODELU TERENU Poprawna generalizacja numerycznego modelu terenu ma szczególnie istotne znaczenie dla zasilania systemów informacji geograficznej (GIS). Dla prowadzenia wiarygodnych analiz przestrzennych szczególnie istotne jest bowiem zachowanie rzeczywistego położenia punktów charakterystycznych kluczowych form terenu. Proces uogólniania powinien mieć zatem charakter generalizacji modelu DLM (digital landscape model), nie zaś generalizacji kartograficznej modelu DCM (digital cartographic model). Tak rozumiana automatyzacja modelowania wieloskalowego NMT wymaga zatem stosowania metod filtracji lokalnej. Istnieje wiele odmian tej metody, np. metoda filtracji iteracyjnej wykorzystującej minimalizację funkcji entropii, czy też metoda hierarchicznej generalizacji numerycznego modelu terenu w postaci TIN. Interesujące rezultaty można osiągnąć także przy wykorzystaniu metod inteligencji obliczeniowej. .
SIECI NERONOWE I WNIOSKOWANIE ROZMYTE W GENERALIZACJI NMT Do grupy algorytmów inteligencji obliczeniowej zaliczyć można między innymi: sztuczne sieci neuronowe i systemy wnioskowania rozmytego. Obie te metody można zastosować do generalizacji numerycznego modelu terenu, zarówno zapisanego w strukturze GRID jak i w strukturze TIN. Wykorzystanie sztucznych sieci neuronowych polega na zbudowaniu bazy wiedzy systemu poprzez zdefiniowanie zestawu przykładów wraz z poprawnymi rozwiązaniami (rozwiązanie implicite). Zastosowanie systemów wnioskowania rozmytego sprowadza się do jawnego określenia zestawu reguł generalizacyjnych bazujących na zdefiniownych nieliniowych funkcjach przynależności (rozwiązanie explicite). Obie metody dają poprawne wyniki, pozwalając zarazem na zachowanie istotnych relacji topologicznych pomiędzy elementami strukturalnymi rzeźby terenu. Najistotniejszym problemem badawczym pozostaje zagadnienie odpowiedniej kalibracji systemu, umożliwiającej zdefiniowanie skoku skalowego. Pozwoliłoby to na określenie przez użytkownika systemu wynikowej skali opracowania
METODA LINIOWA Construct a (Delauney) triangulation of the data set FOR each point at which to interpolate Find the corresponding Delauney triangle Use planar interpolation to derive the value END
ZADANIA W DZIEDZINIE WYKRYWANIA PRZECIĘĆ Test lub problem decyzyjny Mając dwa obiekty geometryczne, określić czy się przecinają Zliczanie przecięć lub ich raportowanie Mając zbiór N obiektów geometrycznych, podać liczbę ich przecięć lub raportować przecięcia Problem tworzenia obiektów Mając zbiór N obiektów geometrycznych, zbudować nowy obiekt będący ich przecięciem (ang. Construction problem)
DEFINICJA PROBLEMU • Mając N odcinków na płaszczyźnie, podać wszystkie punkty będące ich przecięciem • LINE SEGMENT INTERSECTION (LSI). • ZBIÓR S = {s1, s2, ..., sN}odcinków płaszczyzny • Dla 1 iN, si = (ei1, ei2) (punkty końcowe odcinków), • oraz 1 j 2, eij = (xij, yij) (współrzędne punktów końcowych). • ZADANIE: Określ wszystkie punkty przecięć odcinków S. • ZAŁOŻENIE • Nie ma dwu odcinków w zbiorze S które są do siebie prostopadłe • Żadne z trzech odcinków nie mają wspólnego punktu
ALGORYTM WYKRYWANIA PRZECIĘĆ – BRUTE FORCE Dla każdej pary odcinków w S, sprawdzić czy odcinki się przecinają. (Test przecięcia dwu odcinków można wykonać w stałym czasie. Wykorzystywana jest postać parametryczna prostej oraz operacja iloczynu skalarnego. ANALIZA Przetwarzanie wstępne: brak Zapytanie: O(N2);występuje N(N - 1) / 2 O(N2) par, z których każda wymaga stałego czasu na test przecięcia. Pamięć: O(N); w zbiorze S.
WYKRYWANIE PRZECIĘĆ ALGORYTM ZAMIATANIA PŁASZCZYZNY - ang. Plane sweep algorithm
ALGORYTM WYKRYWANIA PRZECIĘĆ SHAMOS-HOEY LEWY PUNKT KOŃCOWY
ALGORYTM WYKRYWANIA PRZECIĘĆ SHAMOS-HOEY PRAWY PUNKT KOŃCOWY
ALGORYTM WYKRYWANIA PRZECIĘĆ SHAMOS-HOEY WYKRYWANIE PRZECIĘĆ S ORAZ S’ MUSZĄ SĄSIADOWAĆ W DRZEWIE BINARNYM
DRZEWO PRZEDZIAŁÓW – INTERVAL TREE Drzewo odcinkowe stanowi binarne drzewo przechowujące przedziały prostej rzeczywistej, której punkty końcowe są liczbami całkowitymi z ustalonego zakresu. Struktura drzewa w której przechowywane są przedziały zdefiniowana zostaje dla zakresu przedziałów [l, r], gdzie l i r muszą być potęgami liczby 2.
PRZYKŁADOWE DRZEWO PRZEDZIAŁÓW 0,16 [7,12] 0,8 8,16 [0,4] [1,6] 0,4 4,8 8,12 12,16 [9,10] [6,7] [13,15] [9,11] 0,2 2,4 4,6 6,8 8,10 10,12 12,14 14,16 [1,1] Węzły – oznaczone jako elipsy reprezentują predefiniowane przedziały w budowanym drzewie przedziałów Przedziały w nawiasach kwadratowych przedstawiają przedziały, które mają być elementami badanego zbioru danych
0,16 [7,12] 0,8 8,16 0,4 4,8 8,12 12,16 [6,7] [9,10] [13,15] [9,11] L R [0,4] [1,6] [1,6] [0,4] PRZYKŁADOWE DRZEWO PRZEDZIAŁÓW Przedziały przechowywane są jako drzewa AVL w podanym porządku sortowania Lewe - wzrastająco Prawe - malejąco
ZRÓWNOWAŻONE DRZEWO BINARNE Mówimy że drzewo uporządkowane jest zrównoważone (ang. balanced), jeśli na wszystkich poziomach poza najniższym zawiera wszystkie możliwe węzły oraz liście na najniższym poziomie są ułożone od lewej strony. Spełnienie tego warunku oznacza, że jeśli drzewo składa się z n węzłów, to żadna ścieżka od korzenia do któregokolwiek z tych węzłów nie jest dłuższa niż log2 n
OBRÓT W LEWO W DRZEWIE BINARNYM OBRÓT W PRAWO W DRZEWIE BINARNYM
RÓWNOWAŻENIE DRZEWA BINARNEGO • Przeczodzenie z węzła dolnego w górę, obrót w prawo w przypadku, gdy lewy węzeł mniejszy od bieżącego • Przechdzenie od korzenia w dół, obroty w lewo
WYZNACZANIE PRZECIĘĆ PROSTOKĄTÓW Algorytm wykorzystuje drzewa przedziałów Podczas działania algorytmu prosta zamiatająca (plane sweep algorithm), prostopadła do osi X, przechodzi od lewej do prawej strony. Zdarzeniami (event points)są lewe i prawe krawędzie prostokątów. Lewa krawędź: 1. Porównaj przedział ze względu na współrzędną y ze zbiorem aktywnym w celu wykrycia nakładania się. 2. Dodaj przedział y do zbioru aktywnego. Prawa krawędź: Usuń przedział y prostokąta ze zbioru aktywnego. Zbiór aktywny przechowywany jest w drzewie przedziałów.