Download
1 / 23
230 likes | 317 Views
Distributed Computing with Adaptive Heuristics. Aaron D. Jaggard Rutgers/Colgate. Michael Schapira Princeton Innovations in Computer Science 09 January 2011 Partially supported by NSF. Rebecca N. Wright Rutgers. This Talk.

E N D
Distributed Computingwith Adaptive Heuristics Aaron D. Jaggard Rutgers/Colgate Michael Schapira Princeton Innovations in Computer Science 09 January 2011 Partially supported by NSF Rebecca N. Wright Rutgers
This Talk • Identify new aspects of the boundary between game theory and distributed computing • Look at some initial results • Identify various avenues for future work
Background Areas Game Dynamics (Natural Behaviors) DistributedComputing simple, myopic rules of behavior; convergence in synchronized environment nodes interacting in an asynchronous environment
Motivation Many real-world settings involve both simple, myopic behavior and asynchronicity • Network protocols • Routing • Congestion control • ... • Asynchronous circuits
Research Agenda Distributed Computing with Adaptive Heuristics(BGP, TCP, … ) new questions in game theory and economics (fictitious play, regret minimization,…) novel applications in distributed computing (congestion control, asynchronous circuits,…) Goal: Explore dynamics of adaptive heuristics when asynchrony is allowed
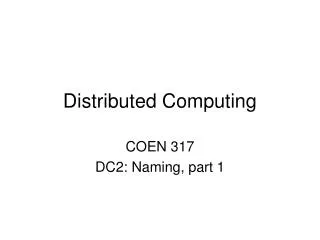
Understanding when Dynamics Converge: A Simple Example • Two stable states (pure Nash equilibria) Bach Stravinsky (5,4) (1,1) Bach (0,0) (4,5) Stravinsky
Understanding when Dynamics Converge: A Simple Example • If either player is activated alone, the system converge Bach Stravinsky (5,4) (1,1) Bach (0,0) (4,5) Stravinsky
Understanding when Dynamics Converge: A Simple Example • Without control over who is activated, the system might not converge Bach Stravinsky (5,4) (1,1) Bach (0,0) (4,5) Stravinsky
Basic Model • n nodes (the players) • Node i has action space Ai • Each node i has a reaction function fi: A1 x A2 x ...xAn→Ai that determines i’s next action based on other current actions • No dependence on own action
Dynamics • Infinite sequence of discrete timestepst = 1, … • Schedule s:{1,…} → 2[n] determines which set of players is activated at time t. • Fair schedules • Start at an initial state; at each time step t, let the nodes in s(t) react using their reaction functions
Convergence • The players’ action profile a=(a1,…, an) is a stable state if fi(a) = ai for every i. • The system is convergent if the dynamics always converge (for all initial states and all fair schedules)
Two High-Level Questions • What classes of systems are guaranteed (or cannot be guaranteed) to always converge to a stable state? • How hard is it to determine whether a system always converges to a stable state?
Basic Result Theorem: If the system has multiple stable states, then the system is not convergent. (I.e., there is some initial state and some schedule that diverge.) • Actually, can strengthen this: • Allow some history-dependence • Allow randomness in reaction functions
Revisiting Our Example Bach Stravinsky (5,4) (1,1) Bach (0,0) (4,5) Stravinsky
A Few Words About the Proof • Inspired by approach to FLP result on impossibility of resilient consensus
Applications • Interdomain routing • Congestion control • Best-reply dynamics in general games • Diffusion of technologies in social networks • Asynchronous circuits • …
Communication Complexity Theorem: Determining whether a system of n nodes, each with two actions, is convergent may require Ω(2n) bits. • Even if all reaction functions are deterministic, and do not depend on history or own action • Uses a reduction from SET DISJOINTNESS. • Constructed system has a unique stable state
Computational Complexity Theorem: Determining whether a system of n nodes, each with deterministic and historyless reaction function, is convergent is PSPACE-complete. • So, difficult even if the reaction functions are succinctly represented (so that they could be transmitted quickly) • Under complexity assumptions, no short witnesses (in general) of being convergent
Scheduling Question: Does randomness help? Bach Stravinsky (5,4) (1,1) Bach (0,0) (4,5) Stravinsky
Scheduling Question: Does randomness help? Answer: No. Divergence may not only be possible, but overwhelmingly likely. • Issues of r-fairness
Open Questions • What are the convergence guarantees and impossibility results • For other heuristics • For other notions of convergence • For other notions of equilibrium • We’ve taken first steps in the context of regret-minimizing dynamics
Other Open Questions • Variations in information • Outdated information • Knowledge only of own utility function (uncoupled dynamics) • Lots of others
Summary • Simple behaviors show up in lots of settings • Important to understand dynamic behavior when asynchrony is allowed • Initial results on the impossibility of guaranteeing convergence • Lots of open questions • What can we say about the dynamic behavior in other natural asynchronous settings?