Download
1 / 1
10 likes | 159 Views
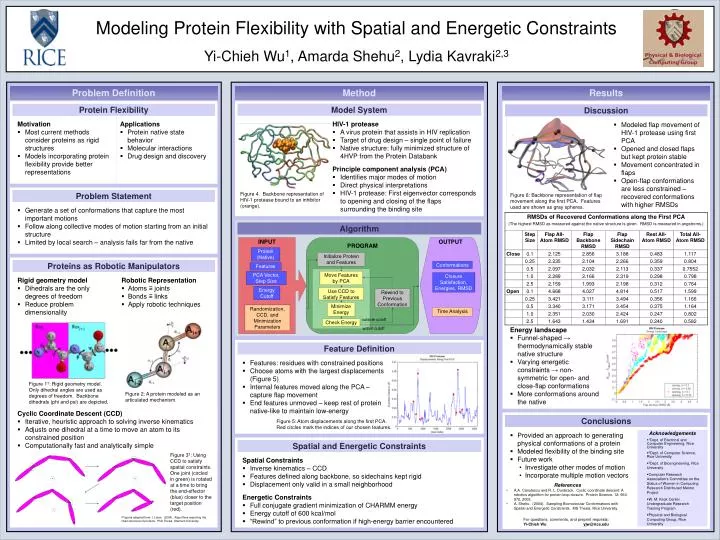
INPUT. PROGRAM. OUTPUT. Protein (Native). Initialize Protein and Features. Conformations. Features. PCA Vector, Step Size. Move Features by PCA. Closure Satisfaction, Energies, RMSD. Energy Cutoff. Use CCD to Satisfy Features. Rewind to Previous Conformation. Minimize Energy.

E N D
INPUT PROGRAM OUTPUT Protein (Native) Initialize Protein and Features Conformations Features PCA Vector, Step Size Move Features by PCA Closure Satisfaction, Energies, RMSD Energy Cutoff Use CCD to Satisfy Features Rewind to Previous Conformation Minimize Energy Randomization, CCD, and Minimization Parameters Time Analysis outside cutoff Check Energy within cutoff Modeling Protein Flexibility with Spatial and Energetic Constraints Yi-Chieh Wu1, Amarda Shehu2, Lydia Kavraki2,3 Problem Definition Method Results Motivation • Most current methods consider proteins as rigid structures • Models incorporating protein flexibility provide better representations Applications • Protein native state behavior • Molecular interactions • Drug design and discovery HIV-1 protease • A virus protein that assists in HIV replication • Target of drug design – single point of failure • Native structure: fully minimized structure of 4HVP from the Protein Databank Principle component analysis (PCA) • Identifies major modes of motion • Direct physical interpretations • HIV-1 protease: First eigenvector corresponds to opening and closing of the flaps surrounding the binding site • Modeled flap movement of HIV-1 protease using first PCA • Opened and closed flaps but kept protein stable • Movement concentrated in flaps • Open-flap conformations are less constrained – recovered conformations with higher RMSDs Model System Protein Flexibility Discussion • Generate a set of conformations that capture the most important motions • Follow along collective modes of motion starting from an initial structure • Limited by local search – analysis fails far from the native Problem Statement Figure 4. Backbone representation of HIV-1 protease bound to an inhibitor (orange). Figure 6: Backbone representation of flap movement along the first PCA. Features used are shown as gray spheres. Algorithm Rigid geometry model • Dihedrals are the only degrees of freedom • Reduce problem dimensionality Robotic Representation • Atoms ≡ joints • Bonds ≡ links • Apply robotic techniques Proteins as Robotic Manipulators Energy landscape • Funnel-shaped → thermodynamically stable native structure • Varying energetic constraints → non-symmetric for open- and close-flap conformations • More conformations around the native • Features: residues with constrained positions • Choose atoms with the largest displacements (Figure 5) • Internal features moved along the PCA – capture flap movement • End features unmoved – keep rest of protein native-like to maintain low-energy Feature Definition Figure 1†: Rigid geometry model. Only dihedral angles are used as degrees of freedom. Backbone dihedrals (phi and psi) are depicted. Figure 2: A protein modeled as an articulated mechanism. Cyclic Coordinate Descent (CCD) • Iterative, heuristic approach to solving inverse kinematics • Adjusts one dihedral at a time to move an atom to its constrained position • Computationally fast and analytically simple • Provided an approach to generating physical conformations of a protein • Modeled flexibility of the binding site • Future work • Investigate other modes of motion • Incorporate multiple motion vectors Conclusions Figure 5: Atom displacements along the first PCA. Red circles mark the indices of our chosen features. Acknowledgements • 1Dept. of Electrical and Computer Engineering, Rice University • 2Dept. of Computer Science, Rice University • 3Dept. of Bioengineering, Rice University • Computer Research Association’s Committee on the Status of Women in Computing Research Distributed Mentor Project • W. M. Keck Center Undergraduate Research Training Program • Physical and Biological Computing Group, Rice University Spatial Constraints • Inverse kinematics – CCD • Features defined along backbone, so sidechains kept rigid • Displacement only valid in a small neighborhood Energetic Constraints • Full conjugate gradient minimization of CHARMM energy • Energy cutoff of 600 kcal/mol • “Rewind” to previous conformation if high-energy barrier encountered Spatial and Energetic Constraints Figure 3†: Using CCD to satisfy spatial constraints. One joint (circled in green) is rotated at a time to bring the end-effector (blue) closer to the target position (red). • References • A.A. Canutescu and R. L. Dunbrack. Cyclic coordinate descent: A robotics algorithm for protein loop closure. Protein Science, 12: 963-972, 2003. • A. Shehu. (2004). Sampling Biomolecular Conformations with Spatial and Energetic Constraints. MS Thesis, Rice University. †Figures adapted from: I. Lotan. (2004). Algorithms exploiting the chain structure of proteins. PhD Thesis, Stanford University. For questions, comments, and preprint requests: Yi-Chieh Wu yjw@rice.edu