Download
1 / 19
190 likes | 367 Views
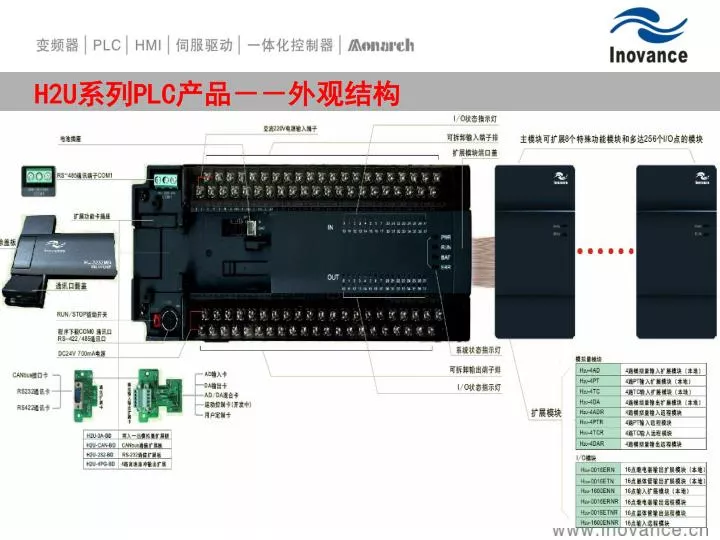
H2U 系列 PLC 产品--外观结构. Y0 脉冲口相关特殊元件. Y1 脉冲口相关特殊元件. Y2 脉冲口相关特殊元件. Y3 脉冲口相关特殊元件. Y4 脉冲口相关特殊元件. 脉冲定位指令新功能. 加减速时间可分别设置;. 运行中脉冲目标值可变;. 中断定位功能;. 定位完成中断;. 同一脉冲口多指令直接切换功能;. 每一个脉冲口都可以独立设置加减速时间、运行中目标值可变. 每一个脉冲口都可以独立设置加减速时间. /S-ON 伺服使能信号与脉冲输出之间的逻辑配合; (注意伺服本身使能时间).

E N D
脉冲定位指令新功能 • 加减速时间可分别设置; • 运行中脉冲目标值可变; • 中断定位功能; • 定位完成中断; • 同一脉冲口多指令直接切换功能;
每一个脉冲口都可以独立设置加减速时间、运行中目标值可变每一个脉冲口都可以独立设置加减速时间、运行中目标值可变 每一个脉冲口都可以独立设置加减速时间 /S-ON 伺服使能信号与脉冲输出之间的逻辑配合; (注意伺服本身使能时间) • 有效条件位M8135-M8139 特殊功能有效为ON 运行中目标值可变 • 有效条件位M8135-M8139
同一脉冲口可以实现中断定位功能、多指令直接切换同一脉冲口可以实现中断定位功能、多指令直接切换 • 有效条件位M8135-M8139 特殊功能有效为ON 设备实际情况脉冲切换条件最好用伺服的“位置到达”信号 (如在快速正反转、多动作之间的逻辑切换等) • 有效条件位M8085-M8089
使用注意事项 • 根据设备实际情况脉冲切换条件最好用伺服的“位置到达”信号; (如在快速正反转、多动作之间的逻辑切换等) • /S-ON伺服使能信号与脉冲输出之间的逻辑配合; (注意伺服本身使能时间) • 伺服分频输出不能直接到PLC高速输入,(三菱伺服除外);
PLSR指令速度限制 • 速度范围10—100000Hz频率; 输出频率最低值:
DRVI/DRVA指令速度限制 • 速度范围10—100000Hz频率; 输出频率最低值:
移动台 DOG 高性能 X1原点信号 Y0定位脉冲 Y1脉冲方向 com0/1-com 汇川PLC-H2u与IS500伺服举例: 定位应用示例: H2U系列PLC提供多种定位指令,包括原点回归,ABS绝对位置读出,加减速脉冲输出,变速脉冲输出,相对及绝对定位等;
汇川PLC - H2U与IS500位置模式控制(定位指令) 8脉冲、12方向或8-CW、12-CCW
PLC-H2U +IS500伺服实例计算 F 备注:汇川伺服电机为2500增量编码器, 电子齿轮比1/1时,伺服电机单圈脉冲 为4*2500=10000个脉冲/圈 丝杠螺距 3mm:3000um/10000=0.3um 理论计算精度:1个脉冲—对应0.3um M a 伺服转速/秒 = H2U脉冲数/单圈脉冲=100000/2475≈40.4转/秒*60=2424转/分钟 丝杠转速/秒 = 伺服最大速度/减速比=100000/2475/2≈20.2转/秒 工作台移动速度/分钟=丝杠转速*螺距*60秒=100000/2475/2*0.003*60≈3.64米/分钟
伺服位置控制模式的简易调试参数: H0200=1, 位置模式(0为速度模式、2为转矩模式) H0500=0,外部脉冲给定量 H0506=10ms,脉冲平滑器 H0507=10000,齿轮比分子(伺服1/1最大脉冲数) H0509=2475,齿轮比分母(伺服单圈脉冲数) H0515=0,脉冲+方向(2为差分脉冲、3为CW/CCW) 备注:带负载则需调节H08组—增益参数,这里不做具体介绍。
