Download
1 / 57
570 likes | 649 Views
A Generalized Likelihood Ratio Approach to the Detection of Jumps in Linear Systems. Min Luo. Outlines. Kalman filter GLR Adaptive filtering An example. FOR MORE INFO.

E N D
A Generalized Likelihood Ratio Approach to the Detection of Jumps in Linear Systems Min Luo
Outlines • Kalman filter • GLR • Adaptive filtering • An example FOR MORE INFO... Alan S.Willsky, “A Generalized Likelihood Ratio Approach to the Detection and Estimation of Jumps in Linear System”, IEEE Transaction on Automatic Control, Feb, 1976
Linear Stochastic Systems With Unknown Jumps ……(1) represent the presence of the ith type of abrupt Change. --- is the unknown time at which the failure occurs --- denotes the magnitude of the failure
Kalman Filter Design a Kalman filter based on normal operation: ..….(2)
Kalman Filter ……(3) are the response if no abrupt change occurs.
Kalman Filter ……(4)
Matched Filter ……(5) --- zero-mean white Gaussian with covariance Thus, we have a standard detection problem in white noise. The solution to this problem involves mathched filtering operation.
Generalized Likelihood Ratio Test We say that a testisageneralized likelihood ratio test for testing between hypotheses and when when ……(6) where
Generalized Likelihood Ratio Test Where the constant is such that ……(7) The precise optimal properties of the GLR test in the general case are unknown, but for many special cases, the GLR test is optimal.
Online GLR Compute the maximum likelihood estimates based on r(1),…, r(k) and the hypothesis H1. ……(8)
Online GLR Deterministic C: Linear combination of residuals: ……(9)
Online GLR The MLE that maximizes is the value …(10) The decision rule is: …(11)
Online GLR • Data Window • At any time , we restrict our optimization over to an • interval of the form We now consider the case in which we hypothesize --- an unknown scalar --- a given set of hypothesized “failure directions”
Online GLR If is known, the likelihood of a type i change having occurred at time If is unknown, the GLR for this change is …(12)
Online GLR …(13) The decision as to the failure: …(14)
GLR Algorithm Summary Kalman Filter Matched Filter Likelihood Calculation GLR Algorithm
Adaptive Filtering Once a jump has been detected by the GLR detector, we can use MLE’s to directly increment our state estimate. …(15) --- represents the contribution to x(k) if a jump occurs at time --- represents the response of Kalman filter to the jump prior to the detection
Direct Compensation Implementation of direct compensation technique
Some Comments of Adaptive Filtering Increase the estimation error covariance to reflect the degradation in the quality of the estimate caused by the jump. …(16) is error covariance for
Final Issue • Tradeoff between fast detection and accurate estimation of jump: • Different size of finite data window of GLR decides • small --> accurate estimation of the jump • --> quick detection
Detection Probability Calculation The choice of a decision threshold and a window length requires the tradeoff among detection delay time, the Pf of the false alarm, and the of correct detection of a jump of magnitude at time . …(17)
Apply GLR to a Tracking Problem The problem is to design a tracking filter which uses position measurements taken at 30s intervals to track the motion of a vehicle along a straight line.
Example The vehicle is subject to occasional step change of unknown magnitude in either position or velocity. The tracking filter is a Kalman filter operating in steady state and requires 60-90 min to completely respond to such jumps. The GLR system was implemented with the detection law:
Example The optimization of is constrained to Jump identification is made at the first time the above formula is satisfied: PF=0.005, PD>0.9
(a) Filter residuals for a 1320ft jump in position at 5 min (b) Likelihood ratio for (a) using GLR
Conclusion Develop an adaptive filtering technique for discrete-time linear stochastic systems subject to abrupt jumps in state variables. • The estimation system consists of Kalman filter and a detection-compensation system based on GLR testing.
Conclusion • Once a jump is detected, we can adjust the filter in one of three ways: • Directly increment the state estimate • Increase the estimation error covariance and thus allow the filter to adjust itself to the jump • Adjust both
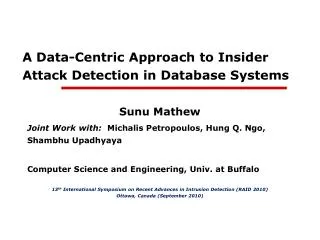
Process Analysis and Abnormal Situation Detection: From theory to Practice
Problem • Large volumes historical data • The data are highly correlated • The information stored in one variable is small • Measurements are often missing on many variables
Possible Solution • PCA • PLS (projection to latent structures) • Outline: • Discusses the use of latent variable models • Multivariate statistical process monitoring • Abnormal situation detection • Fault diagnosis
Multivariate Nature of Fault Detection • Univariate chart(Shewhart) Problem: Most of the time the variables are not independent of one another, and none of them adequately defines product quality by itself. • Multivariate chart
Statistical Process ControlVersus Statistical Quality Control • Statistical quality control (SQC) One can ignore the hundreds of process variables that are measured much more frequently than the product quality data. • Statistical process control (SPC) One must look at all the process data as well.
Statistical Process Control Advantage of monitoring process data: • Easier to diagnose the source of the problem • Quality data may not be available at certain stages of the process
Latent Variables These variables are highly correlated and the effective dimension of the space in which they move is very small (usually less than ten). Consider the historical process data to consist of an (n by k ) matrix of process variable measurements X and a corresponding ( n by k) matrix of product quality data Y.
Latent Variables T is (n by A) matrix of latent variable scores. P(k by A), Q(m by A) are loading matrices that show how latent variables are related to X, Y variables. Advantage: By working in this low-dimensional space of the latent variables, the problems of process analysis, monitoring and optimization are greatly simplified.
Latent Variable Methods • PCA • PLS • Reduced rank regression (RRR) • Canonical variate analysis(CCR) or Canonical correlation regression (CVR)
Exploration and Analysis of Process Databases By examining the behavior of the process data in the projection spaces defined by the small number of latent variables, regions of stable operation, sudden changes, or slow process drifts may be readily observed.
Checking Data Quality for Process Modeling • Identify outliers, check data for clusters • Select data for the training part of multivariate control charts
Process Monitoring and Fault Diagnosis A model is built to relate X and Y using available historical or specially collected data. Monitoring charts are then constructed for future values of X. • Two complementary multivariate control charts • for process monitoring : • Hotelling’s T2chart
T2 Chart is the estimated variance of the corresponding latent variable. This chart will check if a new observation vector of measurements on k process variables projects on the hyperplane within the limits determined by the reference data.
SPEXChart • SPEx chart is computed from the reference PLS or PCA model. This latter plot will detect the occurrence of any new events that cause the process to move away from the hyperplane defined by the reference model.
Fault Diagnosis PLS or PCA models are used to construct the multivariate charts, they provide the user with the capacity for diagnosing assignable causes. Contribution plots are used to detect variables responsible for an out-of-control signal on SPEx ,T2.
Troubleshooting and Monitoringof Batch Processes– three-dimensional data array X(n by k by L) k process variables are measured at L time intervals for each of n batches.
Multiway Extensions of PCA/ PLS The matrix is unfolded into a two-dimensional array such that each row corresponds to a batch. Mean centering of the variables effectively subtracts the trajectory, thus converting a nonlinear problem to one that can be tackled with linear methods such as PCA and PLS.
Multiway Extensions of PCA/ PLS plot the loadings of each variable, for each time interval,for the first principal component of a PCA analysis where the batch data are unfolded.
the scores of the first two principal components for 61 completed batches
Online SPC Charts When data are available in a historical database on many past normal batches, multivariate PCA and PLS models can be developed to establish online SPC charts for monitoring the progress of each new batch.
Online SPC Charts Online monitoring of batch 56