Download
1 / 25
270 likes | 853 Views
Curved mirrors, thin & thick lenses and cardinal points in paraxial optics. Hecht 5.2, 6.1 Monday September 16, 2002. General comments. Welcome comments on structure of the course. Drop by in person Slip an anonymous note under my door …. y. s’. s.

E N D
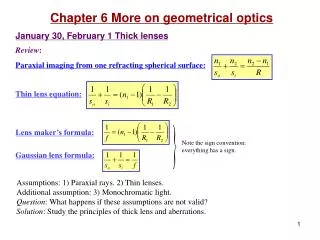
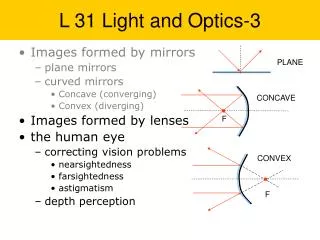
Curved mirrors, thin & thick lenses and cardinal points in paraxial optics Hecht 5.2, 6.1 Monday September 16, 2002
General comments • Welcome comments on structure of the course. • Drop by in person • Slip an anonymous note under my door • …
y s’ s Reflection at a curved mirror interface in paraxial approx. φ ’ O C I
Sign convention: Mirrors • Object distance • S >0 for real object (to the left of V) • S<0 for virtual object • Image distance • S’ > 0 for real image (to left of V) • S’ < 0 for virtual image (to right of V) • Radius • R > 0 (C to the right of V) • R < 0 (C to the left of V)
Paraxial ray equation for reflection by curved mirrors In previous example, So we can write more generally,
Ray diagrams: concave mirrors Erect Virtual Enlarged C ƒ e.g. shaving mirror What if s > f ? s s’
Ray diagrams: convex mirrors Calculate s’ for R=10 cm, s = 20 cm Erect Virtual Reduced ƒ C What if s < |f| ? s s’
Thin lens First interface Second interface
I O f f ‘ s s’ Bi-convex thin lens: Ray diagram Erect Virtual Enlarged n n’ R1 R2
O f f ‘ I s s’ Bi-convex thin lens: Ray diagram R1 R2 Inverted Real Enlarged n n’
O I f f ‘ s s’ Bi-concave thin lens: Ray diagram n’ n R1 R2 Erect Virtual Reduced
Converging and diverging lenses Why are the following lenses converging or diverging? Converging lenses Diverging lenses
O x f f ‘ x’ I s s’ Newtonian equation for thin lens R1 R2 n n’
Complex optical systems Thick lenses, combinations of lenses etc.. Consider case where t is not negligible. We would like to maintain our Gaussian imaging relation n n’ t nL But where do we measure s, s’ ; f, f’ from? How do we determine P? We try to develop a formalism that can be used with any system!!
Cardinal points and planes:1. Focal (F) points & Principal planes (PP) and points n nL n’ F2 H2 ƒ’ PP2 Keep definition of focal pointƒ’
Cardinal points and planes:1. Focal (F) points & Principal planes (PP) and points n nL n’ F1 H1 ƒ PP1 Keep definition of focal pointƒ
Utility of principal planes Suppose s, s’, f, f’ all measured from H1 and H2 … n nL n’ h F1 F2 H1 H2 h’ ƒ’ ƒ s s’ PP1 PP2 Show that we recover the Gaussian Imaging relation…
Cardinal points and planes:1. Nodal (N) points and planes n n’ N1 N2 nL NP1 NP2
Cardinal planes of simple systems1. Thin lens V’ and V coincide and V’ V H, H’ is obeyed. Principal planes, nodal planes, coincide at center
Cardinal planes of simple systems1. Spherical refracting surface n n’ Gaussian imaging formula obeyed, with all distances measured from V V
Conjugate Planes – where y’=y n nL n’ y F1 F2 H1 H2 y’ ƒ’ ƒ s s’ PP1 PP2
Combination of two systems: e.g. two spherical interfaces, two thin lenses … n H1 H1’ n2 H’ h’ n’ H2 H2’ 1. Consider F’ and F1’ Find h’ y Y F’ F1’ d ƒ’ ƒ1’
d Combination of two systems: H2 H2’ h H H1’ Find h H1 y Y F2 F ƒ ƒ2 1. Consider F and F2 n n2 n’
Summary H H’ H1’ H1 H2 H2’ F F’ d h h’ ƒ ƒ’