Download
1 / 32
320 likes | 449 Views
Sensor Based Exploration : Incremental Construction of the Hierarchical Generalized Voronoi Graph. Why Sensor Based. Classical work is based on the assumption that a robot has a full knowledge of the world

E N D
Sensor Based Exploration: Incremental Construction of the Hierarchical Generalized Voronoi Graph
Why Sensor Based • Classical work is based on the assumption that a robot has a full knowledge of the world • The problem: realistic deployment of robots into unknown environments and into environments that are too difficult to model • Sensor based planning is important because: • the robot often has no priori knowledge of the world or may have only a coarse knowledge of the world • the world model is bound to contain inaccuracies or unexpected changes
This Algorithm • One of the first motion planning techniques that • relies only on line-of-sight sensor information. • functions in higher dimensions • offers completeness guarantees • A numerically well posed and complete algorithm for sensor based robot mapping of unknown environments. • The robot generates a small portion of the a roadmap edge and then follow this portion to generate the next segment. • The robot traces an edge until it reaches a node, at which it branches to explorer all edges emanating from that node. • When all nodes have no explored directions, the algorithm finishes.
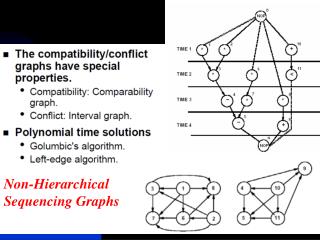
Generalized Voronoi Graphs
Generalized Voronoi Graph vs. Generalized Voronoi Diagram • Generalized Voronoi Diagram (GVD):for planar environment only. • Generalized Voronoi Graph (GVG): a generalization of the GVD into higher dimensions. One dimensional. A more concise representation of the workspace or configuration space.
Distance Function • Distance function: the distance between a point x and a convex set • Multi-object distance function: • All the above distance related • function can be computed from • sensor data directly.
Equidistant Face • The building block of the GVG is two-equidistant face:
Equidistant Face • Three-equidistant face: • By continuing intersection of the two-equidistant faces, a m-equidistant face is formed, which is a one dimensional set of points. • A m+1-equidistant face can be formed also, which is a meet point. • The GVG is the collection of m-equidistant faces(edges) and m+1-equidistant faces(meet point).
Hierarchical GVG • GVG is not necessarily connected in dimensions greater than two, and thus is not a roadmap and insufficient for path planning.
Hierarchical GVG • Higher order GVG is defined to connect the GVG: recursively defined on lower dimensional equidistant faces. • HGVG: the collection of all GVG and all higher order GVG. • We will focus on R3 only in the rest of this paper.
Second-Order GVG • Second order two-equidistant face:
Second-Order GVG • The cycle of the second order GVG implies the existence of GVG inside of it. • Linking from outer second order GVG to GVG is achieved via gradient descent of the distance to the second closest obstacle.
GVG Tracing Function • Edge tracing: trace the roots of the expression as is varied. x: point on the GVG. z1: in the tangent direction of x. At x, let the hyperplane spanned by local coordinates z2-zmbe termed the normal plane. The tracing function This function assumes a zero value only on the GVG.
GVG Edge Construction • edge construction: • predictor step: moves the robot for a small distance along the tangent direction of the GVG • corrector step: find the intersection of the GVG and the correcting plane. This is achieved through the Newton method: It can be proved that the Jacobian matrix is always nonsingular.
Some Details • The tangent to the graph is defined by the vector orthogonal to the hyper plane, which contains the m closest points of the m closest obstacles
Some Details • Meet point detection: by watching for an abrupt change in the direction of the gradients to the m closest obstacles. Accessibility: using gradient ascent on the multi-object distance function, moving in a direction to which the sensor with the smallest value is facing.
Construction of the Second- Order GVG • This section applies the same tracing method for GVG to trace the edges of second-order GVG. • The tracing function is: • Tangent direction: is the null space of the Jacobian of G2:
Simulations • Planar Simulations
Simulations • Planar Simulations
Simulations • Three-Dimensional: GVG only, not connected; HGVG, GVG+GVG2, connected
Simulations • Three-Dimensional: GVG only, not connected; HGVG, GVG+GVG2, connected
Experiments • Circular mobile robot base in the planar case • Jagged due to crudely approximated tangent • However, CVG is connected and maxim clearance from the workspace boundary.
Conclusions on GVG • An incremental procedure to construct the GVG and the HGVG is introduced • Requires only local sensor distance data • Future work: exploit geometries of the HGVG to locate itself on the partially explored map or conclude the robot has entered new territory.
Let’s Assume… • We have an a priori map of the environment OR • We have sufficient sensor information to reconstruct the environment
Supporting References • “Motion Planning Using Potential Fields,” R. Beard & T. McClain, BYU, 2003 • You should download this from the course page and read it
Lecture Objectives • Examine alternate approaches to motion planning Roadmap Approach: – Visibility Graph Methods Cell Decomposition: – Exact Decomposition – Approximate: Uniform discretization & quadtree approaches Potential Fields
Sensor Based • Algorithm • Voronoi Diagrams • Hierarchical Voronoi Diagrams • Second Order Voronoi Diagrams • Simulations • The Basic Motion Problem
Sensor Based Exploration: Incremental Construction of the Hierarchical Generalized Voronoi Graph Howie Choset, Sean Walker, Kunnayut Eiamsa-Ard, Joel Burdick February 2000