Download
1 / 1
10 likes | 120 Views
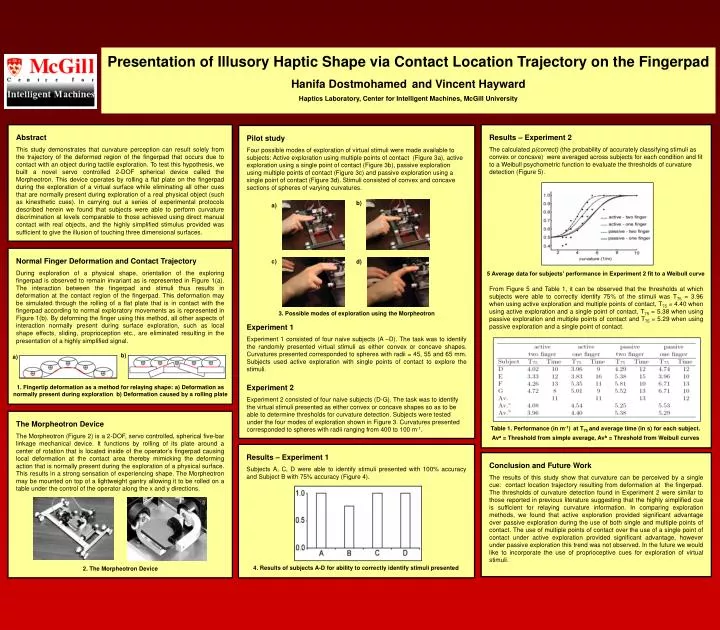
Presentation of Illusory Haptic Shape via Contact Location Trajectory on the Fingerpad Hanifa Dostmohamed and Vincent Hayward Haptics Laboratory, Center for Intelligent Machines, McGill University. Abstract

E N D
Presentation of Illusory Haptic Shape via Contact Location Trajectory on the Fingerpad Hanifa Dostmohamed and Vincent Hayward Haptics Laboratory, Center for Intelligent Machines, McGill University Abstract This study demonstrates that curvature perception can result solely from the trajectory of the deformed region of the fingerpad that occurs due to contact with an object during tactile exploration. To test this hypothesis, we built a novel servo controlled 2-DOF spherical device called the Morpheotron. This device operates by rolling a flat plate on the fingerpad during the exploration of a virtual surface while eliminating all other cues that are normally present during exploration of a real physical object (such as kinesthetic cues). In carrying out a series of experimental protocols described herein we found that subjects were able to perform curvature discrimination at levels comparable to those achieved using direct manual contact with real objects, and the highly simplified stimulus provided was sufficient to give the illusion of touching three dimensional surfaces. Results – Experiment 2 The calculated p(correct) (the probability of accurately classifying stimuli as convex or concave) were averaged across subjects for each condition and fit to a Weibull psychometric function to evaluate the thresholds of curvature detection (Figure 5). From Figure 5 and Table 1, it can be observed that the thresholds at which subjects were able to correctly identify 75% of the stimuli was T75 = 3.96 when using active exploration and multiple points of contact, T75 = 4.40 when using active exploration and a single point of contact, T75 = 5.38 when using passive exploration and multiple points of contact and T75 = 5.29 when using passive exploration and a single point of contact. Pilot study Four possible modes of exploration of virtual stimuli were made available to subjects: Active exploration using multiple points of contact (Figure 3a), active exploration using a single point of contact (Figure 3b), passive exploration using multiple points of contact (Figure 3c) and passive exploration using a single point of contact (Figure 3d). Stimuli consisted of convex and concave sections of spheres of varying curvatures. Experiment 1 Experiment 1 consisted of four naive subjects (A –D). The task was to identify the randomly presented virtual stimuli as either convex or concave shapes. Curvatures presented corresponded to spheres with radii = 45, 55 and 65 mm. Subjects used active exploration with single points of contact to explore the stimuli. Experiment 2 Experiment 2 consisted of four naive subjects (D-G). The task was to identify the virtual stimuli presented as either convex or concave shapes so as to be able to determine thresholds for curvature detection. Subjects were tested under the four modes of exploration shown in Figure 3. Curvatures presented corresponded to spheres with radii ranging from 400 to 100 m-1. b) a) Normal Finger Deformation and Contact Trajectory During exploration of a physical shape, orientation of the exploring fingerpad is observed to remain invariant as is represented in Figure 1(a). The interaction between the fingerpad and stimuli thus results in deformation at the contact region of the fingerpad. This deformation may be simulated through the rolling of a flat plate that is in contact with the fingerpad according to normal exploratory movements as is represented in Figure 1(b). By deforming the finger using this method, all other aspects of interaction normally present during surface exploration, such as local shape effects, sliding, proprioception etc., are eliminated resulting in the presentation of a highly simplified signal. c) d) 5 Average data for subjects’ performance in Experiment 2 fit to a Weibull curve 3. Possible modes of exploration using the Morpheotron b) a) 1. Fingertip deformation as a method for relaying shape: a) Deformation as normally present during exploration b) Deformation caused by a rolling plate The Morpheotron Device The Morpheotron (Figure 2) is a 2-DOF, servo controlled, spherical five-bar linkage mechanical device. It functions by rolling of its plate around a center of rotation that is located inside of the operator’s fingerpad causing local deformation at the contact area thereby mimicking the deforming action that is normally present during the exploration of a physical surface. This results in a strong sensation of experiencing shape. The Morpheotron may be mounted on top of a lightweight gantry allowing it to be rolled on a table under the control of the operator along the x and y directions. Table 1. Performance (in m-1) at T75and average time (in s) for each subject. Ava = Threshold from simple average, Avb = Threshold from Weibull curves Results – Experiment 1 Subjects A, C, D were able to identify stimuli presented with 100% accuracy and Subject B with 75% accuracy (Figure 4). Conclusion and Future Work The results of this study show that curvature can be perceived by a single cue: contact location trajectory resulting from deformation at the fingerpad. The thresholds of curvature detection found in Experiment 2 were similar to those reported in previous literature suggesting that the highly simplified cue is sufficient for relaying curvature information. In comparing exploration methods, we found that active exploration provided significant advantage over passive exploration during the use of both single and multiple points of contact. The use of multiple points of contact over the use of a single point of contact under active exploration provided significant advantage, however under passive exploration this trend was not observed. In the future we would like to incorporate the use of proprioceptive cues for exploration of virtual stimuli. . 4. Results of subjects A-D for ability to correctly identify stimuli presented 2. The Morpheotron Device