Download
1 / 10
120 likes | 356 Views
Uncertainty Principle. Chapter 6. §6.8–6.9. Fourier Analysis. Unbounded Function f ( x ) = A ( k ) cos( kx ) dk x = space , k = wavenumber = 2 p / l cos( kx ) is a wave with wavelength 2 p / k A ( k ) is the Fourier transform of f ( x )

E N D
Uncertainty Principle Chapter 6 §6.8–6.9
Fourier Analysis Unbounded Function f(x) = A(k) cos(kx) dk • x = space, k = wavenumber = 2p/l • cos(kx) is a wave with wavelength 2p/k • A(k)is the Fourier transform of f(x) • f(x) = spatial pattern; A(k) = spectrum • x and k are conjugates
Fourier Analysis f(t) = A(w) cos(wt) dk • t = time, w = angular frequency= 2p/T • cos(wt) is a wave with period 2p/w • A(w)is the Fourier transform of f(t) • f(t) = time signal; A(w) = spectrum • t and w are conjugates
Meaning of FT FT time domain frequency domain FT space domain wavenumber domain
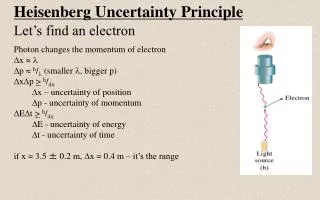
Waves and Uncertainty Frequency and wavelength known exactly, position and time not determined Frequency and wavelength less specific, position and time more specific Frequency and wavelength not determined, position known exactly
Fourier Transforms • The narrower the distribution in space f(x), the more wavenumbers must be specified • The narrower the distribution in time f(t), the more frequencies must be specified
Uncertainty, defined • Root Mean Square (RMS) (Du)2 = <(u – <u>)2> • <x> = expectation of x • It turns out DxDk ≥ ½ • and DtDw ≥ ½
Position and Momentum DxDk ≥ ½ • Recall p = h/l = h/(2p/k) = kh/(2p) = k h • So k = p/h, Dk = Dp/h DxDp ≥ h/2
Time and Energy DtDw ≥ ½ • Recall E = hf = h(w/2p) = wh • So w = E/h, Dw = DE/h DtDE ≥ h/2
Uncertainty and Confinement • Confine mass m to space of size a • Non-relativistic, K = p2/(2m) • DxDp = h/2 • What is the minimum K?