Download
1 / 4
40 likes | 48 Views
IST–2001-33073 PALOMA Progressive and Adaptive Learning for Object Manipulation: a biologically inspired multi-network architecture. Objectives: Define Principles of a new, neurobiologically inspired learning

E N D
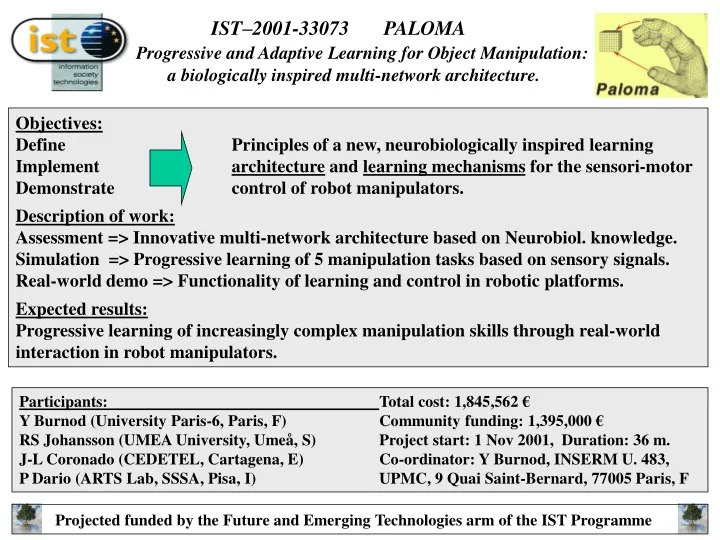
IST–2001-33073 PALOMA Progressive and Adaptive Learning for Object Manipulation: a biologically inspired multi-network architecture. Objectives: Define Principles of a new, neurobiologically inspired learning Implement architecture and learning mechanisms for the sensori-motor Demonstrate control of robot manipulators. Description of work: Assessment => Innovative multi-network architecture based on Neurobiol. knowledge. Simulation => Progressive learning of 5 manipulation tasks based on sensory signals. Real-world demo => Functionality of learning and control in robotic platforms. Expected results: Progressive learning of increasingly complex manipulation skills through real-world interaction in robot manipulators. Participants: Total cost: 1,845,562 € Y Burnod (University Paris-6, Paris, F) Community funding: 1,395,000 € RS Johansson (UMEA University, Umeå, S) Project start: 1 Nov 2001, Duration: 36 m. J-L Coronado (CEDETEL, Cartagena, E) Co-ordinator: Y Burnod, INSERM U. 483, P Dario (ARTS Lab, SSSA, Pisa, I) UPMC, 9 Quai Saint-Bernard, 77005 Paris, F Projected funded by the Future and Emerging Technologies arm of the IST Programme
IST–2001-33073 PALOMA Progressive and Adaptive Learning for Object Manipulation: a biologically inspired multi-network architecture. Multi-network learning architecture for object manipulation (UPMC) Projected funded by the Future and Emerging Technologies arm of the IST Programme
SAI FAI IST–2001-33073 PALOMA Progressive and Adaptive Learning for Object Manipulation: a biologically inspired multi-network architecture. Simulator of human-like tactile afferent activity (UMEA) Input Force profiles Weighting, filtering Output and adding noise Forces in x,y,z Time varying force vector at a point on the finger tip 2 1 mm resolution FA I F x Meissner F x SA I Merkel F y FA II F y Pacini SA II F z Ruffini F z Simulated Recorded activity activity Projected funded by the Future and Emerging Technologies arm of the IST Programme
3D Force Sensor IST–2001-33073 PALOMA Progressive and Adaptive Learning for Object Manipulation: a biologically inspired multi-network architecture. Robot hand: Tactile systemsRobot head: Visual system LINCE stereohead (CEDETEL) 3 component force sensors on fingertips and distributed on/off contact sensors (SSSA) X Y Z Object -Identification 3D Object -Position Projected funded by the Future and Emerging Technologies arm of the IST Programme