Download
1 / 46
520 likes | 715 Views
Chapter 20 Fundamentals of Machining/Orthogonal Machining (Part 2 Review) EIN 3390 Manufacturing Processes Fall, 2010. Power requirements are important for proper machine tool selection. Cutting force data is used to: properly design machine tools to maintain desired tolerances .

E N D
Chapter 20Fundamentals of Machining/Orthogonal Machining(Part 2 Review)EIN 3390 Manufacturing ProcessesFall, 2010
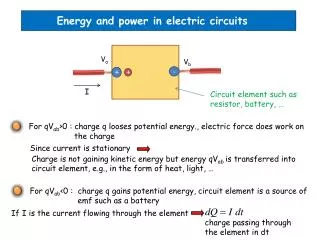
Power requirements are important for proper machine tool selection. • Cutting force data is used to: • properly design machine tools to maintain desired tolerances. • determine if the workpiece can withstand cutting forces without distortion. 20.3 Energy and Power in Machining
Primary cutting force Fc: acts in the direction of the cutting velocity vector. Generally the largest force and accounts for 99% of the power required by the process. • Feed Force Ff :acts in the direction of tool feed. The force is usually about 50% of Fc but accounts for only a small percentage of the power required because feed rates are small compared to cutting rate. • Radial or Thrust Force Fr :acts perpendicular to the machined surface. in the direction of tool feed. The force is typically about 50% ofFf and contributes very little to the power required because velocity in the radial direction is negligible. Cutting Forces and Power
FIGURE 20-12 Oblique machining has three measurable components of forces acting on the tool. The forces vary with speed, depth of cut, and feed.
FIGURE 20-12 Oblique machining has three measurable components of forces acting on the tool. The forces vary with speed, depth of cut, and feed.
Power = Force x Velocity P = Fc. V (ft-lb/min) Horsepower at spindle of machine is: hp = (FcV) / 33,000 Unit, or specific, horsepower HPs: HPs = hp / (MRR) (hp/in.3/min) In turning, MRR =~ 12VFrd, then HPs = Fc / 396,000Frd This is approximate power needed at the spindle to remove a cubic inch of metal per minute. Cutting Forces and Power
Specific Power Used to estimate motor horsepower required to perform a machining operation for a given material. Motor horsepower HPm HPm = [HPs. MRR . (CF)]/E Where E – about 0.8, efficiency of machine to overcome friction and inertia in machine and drive moving parts; MRR – maximum value is usually used; CF – about 1.25, correction factor, used to account for variation in cutting speed, feed, and rake angle. Cutting Forces and Power
Primary cutting force Fc: Fc =~ [HPs. MRR . 33,000]/V Used in analysis of deflection and vibration problems in machining and in design of workholding devices. In general, increasing the speed, feed, depth of cut, will increase power required. In general, increasing the speed doesn’t increase the cutting force Fc. Speed has strong effect on tool life. Cutting Forces and Power
Considering MRR =~ 12Vfrd, then dmax =~ (HPm. E)/[12 . HPs V Fr (CF)] Total specific energy (cutting stiffness) U: U = (FcV)/(V fr d) = Fc/(fr . d) =Ks (turning) Cutting Forces and Power
In Orthogonal Machining (OM), tool geometry is simplified from 3-dimrnsional (oblique) geometry • Three basic orthogonal machining setup • Orthogonal Plate Machining a plate in a milling machine (low-speed cutting) • Orthogonal Tube Turning end-cutting a tube wall in a turning setup – medium-speed ranges. • Orthogonal Disk Machining end-cutting a plate feeding in a facing direction – high-speed cutting. 20.4 Orthogonal Machining (Two Forces)
FIGURE 20-14 Schematics of the orthogonal plate machining setups. (a) End view of table, quick-stop device (QSD), and plate being machined for OPM. (b) Front view of horizontal milling machine. (c) Orthogonal plate machining with fixed tool, moving plate. The feed mechanism of the mill is used to produce low cutting speeds. The feed of the tool is t and the DOC is w, the width of the plate.
FIGURE 20-15 Orthogonal tube turning (OTT) produces a two-force cutting operation at speeds equivalent to those used in most oblique machining operations. The slight difference in cutting speed between the inside and outside edge of the chip can be neglected.
FIGURE 20-17 Schematic representation of the material flow, that is, the chip-forming shear process. f defines the onset of shear or lower boundary. c defines the direction of slip due to dislocation movement.
Assume that 1) the shear process takes place on a single narrow plane as A-B in figure 20- 19. 2) tools cutting edge is perfectly sharp and no contact is being made between the flank of the tool and the new surface. Chip thickness ratio: gc = t / tc = (AB sin f)/[ABcos(f - a)], or tan f = (gccosa)/(1 - gc,sina) Where AB – length of the shear plane from the tool tip to the free surface. 20.5 Merchant’s Model
For consistency of volume, gc = t / tc = (sin f)/[cos(f - a)] = Vc./V, and Vs / V = (cosa)/[cos(f - a)] Where V – velocity for workpiecepasing tool, Vc – chip moving velocity, Vs – shearing velocity, f – onset of shear angle, a - rake angle . 20.5 Merchant’s Model
FIGURE 20-19 Velocity diagram associated with Merchant’s orthogonal machining model.
Assume that the result force R acting on the back of the chip is equal and opposite to the resultant force R’ acting on the shear plane. R is composed of friction force F and normal force N acting on tool-chip interface contact area. R’ is composed of a shear force Fs and normal force Fn acting on the shear plane area As. R is also composed of cutting force Fc and tangential (normal) force Ft acting on tool-chip interface contact area. Ft = R sin (b - a) 20.6 Mechanics of Machining (statics)
FIGURE 20-20 Free-body diagram of orthogonal chip formation process, showing equilibrium condition between resultant forces R and R.
FIGURE 20-21 Merchant’s circular force diagram used to derive equations for Fs , Fr , Ft , and N as functions of Fc, Fr , f, a, and b.
Friction force F and normal force are: F = Fcsina + Ftcosa, N = Fccosa + Ftsina, and b = tan-1m = tan-1 (F/N), Where m - force F and friction coefficient, and b – the angle between normal force N and resultant R. If a = 0, then F = Ft , and N = Fc . in this case, the friction force and its normal can be directly measured by dynamometer. R = SQRT (Fc2 + Ft2 ), Fs = Fccosf - Ftsinf, and Fn = Fcsinf + Ftcosf, Where Fs is used to compute the shear stress on the shear plane 20.6 Mechanics of Machining (statics)
Shear stress: ts= Fs/As, Where As - area of the shear plane, As = (t w)/sinf Where t – uncut ship thickness and w – width of workpiece. ts= (Fcsinfcosf - Ft sin2f )/(tw) psi for a given metal, shear stress is not sensitive to variations in cutting parameters, tool meterial, or cutting environment. Fig. 20-22 shows some typical values for flow stress for a variety of metals, plotted against hardness. 20.6 Mechanics of Machining (statics)
FIGURE 20-22 Shear stress ts variation with the Brinell hardness number for a group of steels and aerospace alloys. Data of some selected fcc metals are also included. (Adapted with permission from S. Ramalingham and K. J. Trigger, Advances in Machine Tool Design and Research, 1971, Pergamon Press.)
Use Merchant’s chip formation model, a new “stack-of-cards” model as shown in fig. 20-23 is developed. From the model, strain is: g= cosa/[sin(f + y) cos(f + y -a)] where f - the angle of the onset of the shear plane, and y - the shear front angle. The special shear energy (shear energy/volume) equals shear stress x shear strain: Us = t .g 20.7 Shear Strain g & Shear Front Angle f
Use minimum energy principle, where will y take on value (shear direction) to reduce shear energy to a minimum: • d(Us)/dy = 0, • Solving the equation above, • y = 450 - y + a/2, and • g= 2cosa/(1 + sina), • It shows the shear strain is dependent only on the rake angle a. 20.7 Shear Strain g & Shear Front Angle f
FIGURE 20-23 The Black–Huang “stack-of-cards” model for calculating shear strain in metal cutting is based on Merchant’s bubble model for chip formation, shown on the left.
Machining is a dynamic process of large strain and high strain rate. The process is a closed loop interactive processes as shown on fig. 20-24. 20.8 Mechanics of Machining (Dynamics)
FIGURE 20-24 Machining dynamics is a closed-loop interactive process that creates a force-displacement response.
Free vibration is the response to any initial condition or sudden change. The amplitude of the vibration decreases with time and occurs at the natural frequency of the system. Forced vibration is the response to a periodic (repeating with time) input. The response and input occur at the same frequency. The amplitude of the vibration remains constant for set input condition and is linearly related to speed 20.8 Mechanics of Machining (Dynamics)
Self-excited vibration is the periodic response to the system to a constant input. The vibration may grow in amplitude and occurs near natural frequency of the system regardless of the input. Chatter due to the regeneration of waviness in the machining surface is the most common metal cutting example. 20.8 Mechanics of Machining (Dynamics)
FIGURE 20-25 There are three types of vibration in machining.
Factors affecting on the stability of machining • Cutting stiffness of workpiece material (machinability), Ks • Cutting –process parameters (speed, feed, DOC, total width of chip) • Cutter geometry (rake asd clearance angles, insert size and shape) • Dynamic characteristics of the machining process (tooling, machining tool, fixture, and workpiece) 20.8 Mechanics of Machining (Dynamics)
Chip formation and regenerative Chatter • In machining, chip is formed due to shearing of workpiece material over chip area (A = t x w), which results in a cutting force. • Magnitude of the resulting cutting force is predominantly determined by the material cutting stiffness Ks and the chip area such that F c = Ks t w. • The direction of the cutting force Fc in influenced mainly by the geometries of rack and clearance angles and edge prep. 20.8 Mechanics of Machining (Dynamics)
FIGURE 20-27 When the overlapping cuts get out of phase with each other, a variable chip thickness is produced, resulting in a change in Fc on the tool or workpiece.
FIGURE 20-28 Regenerative chatter in turning and milling produced by variable uncut chip thickness.
Factors Influencing Chatter: • Cutting stiffness Ks • Speed • FEED • Doc • Total width of chip • Back rack angle • Clearance angle • Size (nose radius), shape (diamond, triangular, square, round) and lead angle of insert 20.8 Mechanics of Machining (Dynamics)
FIGURE 20-29 Milling and boring operations can be made more stable by correct selection of insert geometry.
FIGURE 20-30 Dynamic analysis of the cutting process produces a stability lobe diagram, which defines speeds that produce stable and unstable cutting conditions.
Energy dissipated in cutting is converted to heat, elevating temperature of chip, workpiece, and tool. • As speed increases, a greater percentage of the heat ends up in the chip. • Three sources of heat: • Shear front. • Tool-chip interface contact region. • Flank of the tool. Effects of Temperature
FIGURE 20-31 Distribution of heat generated in machining to the chip, tool, and workpiece. Heat going to the environment is not shown. Figure based on the work of A. O. Schmidt.
FIGURE 20-31 Distribution of heat generated in machining to the chip, tool, and workpiece. Heat going to the environment is not shown. Figure based on the work of A. O. Schmidt.
FIGURE 20-32 There are three main sources of heat in metal cutting. (1) Primary shear zone. (2) Secondary shear zone tool–chip (T–C) interface. (3) Tool flank. The peak temperature occurs at the center of the interface, in the shaded region.
FIGURE 20-32 There are three main sources of heat in metal cutting. (1) Primary shear zone. (2) Secondary shear zone tool–chip (T–C) interface. (3) Tool flank. The peak temperature occurs at the center of the interface, in the shaded region.
Excessive temperature affects • Strength, hardness and wear resistance of cutting tool. • Dimensional stability of the part being machined. • Machined surface properties due to thermal damage • Machine tool, if too excessive. Effects of Temperature
FIGURE 20-33 The typical relationship of temperature at the tool–chip interface to cutting speed shows a rapid increase. Correspondingly, the tool wears at the interface rapidly with increased temperature, often created by increased speed.
Review Questions: 3, 5, 15, and 24 (pages 557 – 558, 5 points for each question ) Problems: 1. a, b, c, d (5 points for each) 3. (10 points) 7. for extra credit: 20 points After your calculation, please compare your HPs and ts with HPs values in table 20-3, and ts values in Figure 20-22. Homework for Chapter 20