Download
1 / 30
300 likes | 396 Views
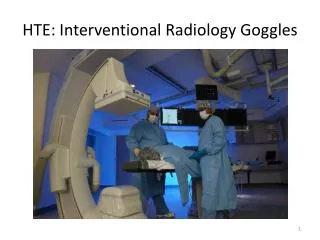
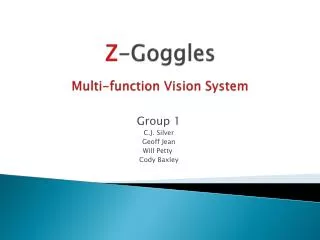
To Chong Ryan Offir Matt Ferrante James Kestyn Advisor: Dr. Tilman Wolf. Smart Goggles. Team Wolf. Augmented Reality Glasses. Virtually superimpose graphics onto real environment Context-specific information supplied to users real-time. Gaming. Gaming Industry Advancement.

E N D
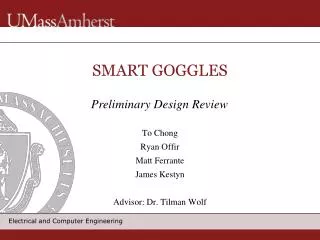
To Chong Ryan Offir Matt Ferrante James Kestyn Advisor: Dr.Tilman Wolf Smart Goggles Team Wolf
Augmented Reality Glasses • Virtually superimpose graphics onto real environment • Context-specific information supplied to users real-time
3D View of our system Sensor Board Tunnel Creek Board & Battery
Specifications for Augmented Reality • System Refresh Rate: 20 Hz • Human visual frame rate: 10-12 FPS • Location Accuracy σL: ±2 feet • Average Walking Speed = 4.4 ft/s • Average Running Speed = 22 ft/s • Orientation Accuracy σθ: ±5° • Angle Update Speed: 80 deg/s • Captures “typical” human movement
Prototyping • Arduino + Sparkfun Sensors and GPS
Technical Challenges – Data Accuracy Gyroscope Drift Measured Over Five Minutes Time
Measuring Kalman Filter Performance SLOW TURN – 10 degrees per second
Measuring Kalman Filter Performance FAST TURN – 50 degrees per second
OpenGL • Draws whole environment • Call simple functions to update camera location • Example: • OpenGL only changes camera position since environment is already computed // rotate 45 in zdir glRotatef(45.0f,0.0f, 0.0f, 1.0f); model->Draw(); glFlush();
OpenGL Camera Camera // rotate 45 in z dir glRotatef(45.0f, 0.0f, 0.0f, 1.0f); Actual View Actual View
Goggle-Based Display http://www.microvision.com
Pico Projector Displays • Image -> Electrical Signals • Electrical Signals drive RGB laser light: intensity & information • RGB + Combiner Optic = single modulated light path • Light output + MEMS Scanning Mirror = Image
Work in Progress • Developing Kalman Filter • Testing/Debugging Sensor Board • Developing final application
FPR • Final Application: PACMAN • Sensor Board • 3D Filter • Displacement
Demo Pictures Tilt Right Tilt Left
Demo Pictures Tilt Down Tilt Up