Download
1 / 22
220 likes | 385 Views
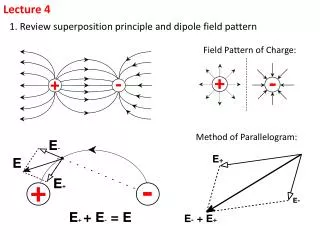
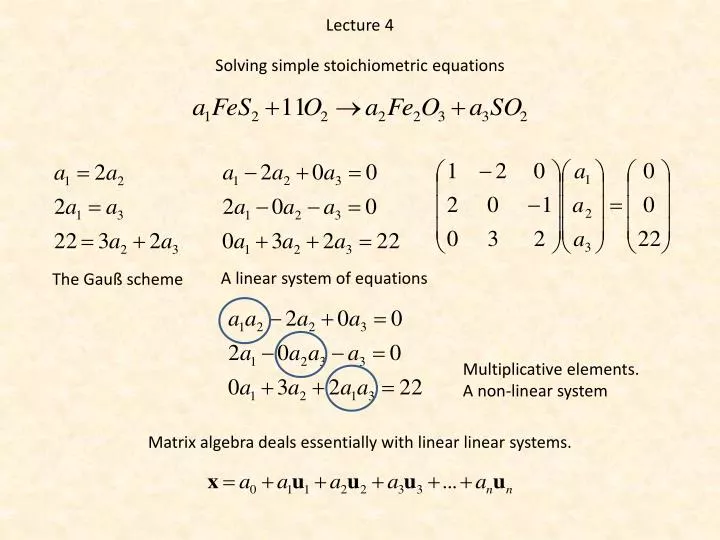
Lecture 4. Solving simple stoichiometric equations. A linear system of equations. The Gauß scheme. Multiplicative elements . A non-linear system. Matrix algebra deals essentially with linear linear systems. Solving a linear system.

E N D
Lecture 4 Solving simple stoichiometric equations A linear system of equations TheGaußscheme Multiplicativeelements. A non-linear system Matrix algebra dealsessentiallywithlinearlinear systems.
Solving a linear system Thedivisionthrough a vectoror a matrixis not defined! 2 equations and fourunknowns
Determinants Det A: determinant of A The determinant of linear dependent matricesis zero. Suchmatricesarecalledsingular.
Higher order determinants for any i =1 to n Laplace formula Thematrixislinear dependent Thenumber of operations raiseswiththefaculty of n.
For a non-singularsquarematrixtheinverseisdefined as Singularmatricesarethosewheresomerowsorcolumnscan be expressed by a linearcombination of others. Suchcolumnsorrows do not containadditionalinformation. Theyareredundant. A matrixissingularifit’s determinant is zero. r2=2r1 r3=2r1+r2 A linearcombination of vectors Det A: determinant of A A matrixissingularifatleast one of theparameters k is not zero.
Theaugmentedmatrix Thetrace of a squarematrixisthe sum of its diagonal entries. An insectspeciesatthreelocationshasthefollowingabundances per season The diagonal entries (trace) of thedotproduct of AB’ containthetotalnumbers of insects per sitekept by predators Thepredationrates per seasonaregiven by
Theinverse of a 2x2 matrix Theinverse of a diagonal matrix Determinant Theinverse of a squarematrixonlyexistsifits determinant differsfrom zero. Singularmatrices do not have an inverse (A•B)-1 = B-1 •A-1 ≠ A-1 •B-1 Theinversecan be unequivocallycalculated by the Gauss-Jordan algorithm
Systems of linearequations Determinant
The general solution of a linear system Identitymatrix OnlypossibleifAis not singular. IfAissingularthe system has no solution. Systems with a uniquesolution Thenumber of independent equationsequalsthenumber of unknowns. X: Not singular TheaugmentedmatrixXaugis not singular and hasthe same rank as X. Therank of a matrixis minimum number of rows/columns of thelargestnon-singularsubmatrix
A matrixislinear independent ifnone of theroworcolumnvectorscan be expressed by a linearcombinations of theremainingvectors A linearcombination of vectors A matrix of n-vectors (roworcolumns) iscalledlinear dependent ifitispossible to express one of thevectors by a linearcombination of theother n-1 vectors. r2=2r1 r3=2r1+r2 Thematricesarelinear dependent If a vectorV of a matrixislinear dependent on theothervecors, Vdoes not containadditionalinformation. Itiscompletelydefined by theothervectors. ThevectorVisredundant. Linearindependence
How to detectlineardependency Any solution of k3=0 and k1=-2k2satisfiestheaboveequations. Thematrixislinear dependent. If a matrixAislinearly independent, thenanysubmatrix of Aisalsolinearly independent Therank of a matrixisthemaximumnumber of linearly independent row and columnvectors
Consistent Rank(A) = rank(A:B) = n Infinitenumber of solutions Consistent Rank(A) = rank(A:B) < n No solution Inconsistent Rank(A) < rank(A:B) Infinitenumber of solutions Consistent Rank(A) = rank(A:B) < n Inconsistent Rank(A) < rank(A:B) No solution Consistent Rank(A) = rank(A:B) = n Infinitenumber of solutions
We haveonlyfourequations but five unknowns. The system isunderdetermined. Themissingvalueisfound by dividingthevectorthroughitssmallestvalues to findthesmallestsolution for natural numbers.
Includinginformation on thevalences of elements Equality of atomsinvolved We have 16 unknows but withoutexperminetnalinformationonly 11 equations. Such a system isunderdefined. A system with n unknownsneedsatleast n independent and non-contradictoryequationsfor a uniquesolution. If ni and aiareunknowns we have a non-linearsituation. We eitherdetermine ni oraiormixedvariablessuchthat no multiplicationsoccur.
Thematrixissingularbecause a1, a7, and a10 do not containnewinformation Matrix algebra helps to determinewhatinformationisneeded for an unequivocalinformation. Fromtheknowledge of thesalts we get n1 to n5
We havesixvariables and sixequationsthatare not contradictory and containdifferentinformation. Thematrixistherefore not singular.
Linearmodelsinbiology The logistic model of population growth K denotesthemaximumpossibledensity under resourcelimitation, thecarryingcapacity. rdenotestheintrinsicpopulation growth rate. Ifr > 1 thepopulationgrowths, atr < 1 thepopulationshrinks. t N 1 1 2 5 3 15 4 45 We needfourmeasurements
Population growth We have an overshot. In thenext time step thepopulationshoulddecreasebelowthecarryingcapacity. Overshot K N K/2 t Fastestpopulation growth