Download
1 / 39
440 likes | 811 Views
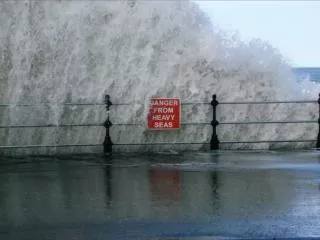
Earthquake Seismology: The stress tensor Equation of motion Hooke’s law The elastodynamic equation of motion P-waves and S-waves. Follows mainly on Lay and Wallace, Modern global seismology, Academic Press. THE STRESS TENSOR. STRESS = FORCE/AREA Pascal=Newton/m 2.

E N D
Earthquake Seismology: • The stress tensor • Equation of motion • Hooke’s law • The elastodynamic equation of motion • P-waves and S-waves Follows mainly on Lay and Wallace, Modern global seismology, Academic Press.
THE STRESS TENSOR STRESS = FORCE/AREA Pascal=Newton/m2 Why stress (and not force)? Fig. from Twiss and Moores
THE STRESS TENSOR • Normal stress: The component of stress acting perpendicular to the plane • Shear stress: The component of stress acting parallel to the plane
THE STRESS TENSOR Consider a small cubic element of rock extracted from the Earth. The stress acting on this element may be visualized as follows: • The first index indicates the plane in question • The second index indicates the direction at which the stress acts
THE STRESS TENSOR The stress tensor in 3D: and 2D (that is, when ) :
THE STRESS TENSOR The stress tensor is symmetric
EQUATION OF MOTION What’s the sum of forces acting at the x1 direction on x1 plane is?
EQUATION OF MOTION Sum of forces acting at the x1 direction on x1 plane is: Sum of forces acting at the x1 direction on x2 plane is: Sum of forces acting at the x1 direction on x3 plane is: What’s the sum of forces acting at the x1 direction?
EQUATION OF MOTION The stress balance at the x1 direction is: The stress balance at the x2 direction is: The stress balance at the x3 direction is: Or more compactly: This is the equation of motion
EQUATION OF MOTION For static problems:
HOOKE’S LAW In general, stress-strain relations are material, pressure and temperature dependent. Yet, under very small strains (such as those occur during the passage of the seismic waves), most materials exhibit linear elastic behavior.
HOOKE’S LAW Rocks subject to infinitesimal strain of short duration, deform reversibly and the strain is related (linearly) to strain according to Hooke’s law: OR: Where C and S are the forth order stiffness and compliance tensors, respectively. (The former formalism is convenient for problems in which the strains components are known and the stress components are the dependent variables, whereas the latter formalism is convenient for problems in which the stress components are known and the strain components are the dependent variables.)
HOOKE’S LAW In general, the stiffness matrix consists of 81 independent entries
HOOKE’S LAW Thanks to the symmetry of the stress tensor, the number of independent elastic constants is reduced to 54
HOOKE’S LAW Thanks to the symmetry of the strain tensor, the number of independent elastic constants is further reduced to 36 A further symmetry relation (Cijkl=Cklij) follows from consideration of a strain energy density function (see Malvern, 1969), leaving 21 elastic moduli in the most general elastic material.
HOOKE’S LAW The stress-strain relation of an isotropic elastic material may be described by 2 independent elastic constants, known as Lame constants, l and m, and: And one finds:
HOOKE’S LAW The 5 elastic constants are expressible in terms of 2 constants. Here is a conversion table:
HOOKE’S LAW For many Earth materials, and when they are exactly equal the material is called Poisson solid, for which .
THE ELASTODYNAMIC EQUATION The following equations are combined to get the equation of motion of isotropic linear elastic medium (with no body forces): The homogeneous equation of motion Hooke’s law The strain-displacement relation
THE ELASTODYNAMIC EQUATION We consider the x1 direction first: For isotropic material, the above equation can be rearranged to get: Similarly, for the x2 and x3 directions, we get: and
THE ELASTODYNAMIC EQUATION In summary, the 3D propagation of waves in isotropic homogeneous elastic medium is described by: 1. 2. 3. Adding the x1 derivative of (1), the x2 derivative of (2) and the x3 derivative of (3) gives: This is the wave equation in terms of volumetric strain. Such equations fall into the category of hyperbolic partial differential equations, whose solution is of the form: and the speed at which volumetric strain propagates is equal to:
THE ELASTODYNAMIC EQUATION The solution to the hyperbolic partial differential is equal to the real part of a harmonic equation of the form: where w and k are the frequency and the wave number, respectively, and the velocity at which the wave propagates is equal to: The solution to describes a wave propagating at the +x direction, whereas the solution to describes a wave propagating at the –x direction.
THE ELASTODYNAMIC EQUATION This is how the solution to looks like: • The the value of q is constant when the phase (wt-kx) is constant. • Lines of constant phase require that x increase when t increase. • The speed at which the constant q line propagates is equal to w/k. • Only part of the solution is physically viable – wave cone.
THE ELASTODYNAMIC EQUATION Here are the solutions at a fixed position (top) and a fixed time (bottom): • The position-fixed solution corresponds to a seismogram. • Period=2p/w • Wavelength=2p/k
P and S waves • According to Helmholtz’s theorem, any vector field u can be represented in terms of a vector potential Y and a scalar potential f (see box at the end): • This means: • A scalar potential field, f, that is curl-free, i.e. no shearing. • A vector potential field, Y, that is divergent-free, i.e. no volume change. • Using Helmholtz’s theorem, the displacement resolved at the x1 direction is: • One can now substitute this expression into the x1 component of the elastodynamic equation: • To get:
P and S waves This indicates that elastodynamic disturbance within an unbounded body consists of three different waves; a dilatational strain propagates at a speed equal to a and two perpendicular shear waves that propagate at a speed that is equal to b, with a>b.
P and S waves Teleseismic
Geometrical spreading for surface waves: and for body waves:
The amplitude of surface waves decays slower with distance than that of body waves. Consequently, after a large earthquakes, surface waves can circle the Earth many times.
Note the reinforcement of the surface waves near the antipodes. In general, the wave amplitude decreases with increasing distance from the source. Note the aftershock.
THE ELASTODYNAMIC EQUATION The 3 elastodynamic equations may be written in equivalent vector form as: 1. The Laplacian of the displacement vector may be expressed as (see box at the end): 2. Next, substituting (2) into (1) gives: 3.