Download
1 / 20
200 likes | 311 Views
Stochastic Current Prediction Enabled Frequency Actuator for Runtime Resonance Noise Reduction. Yiyu Shi*, Jinjun Xiong + , Howard Chen + and Lei He* *Electrical Engineering Dept., University of California, Los Angeles + IBM T. J. Watson Research Center, Yorktown Heights, NY

E N D
Stochastic Current Prediction Enabled Frequency Actuator for Runtime Resonance Noise Reduction Yiyu Shi*, Jinjun Xiong+, Howard Chen+ and Lei He* *Electrical Engineering Dept., University of California, Los Angeles +IBM T. J. Watson Research Center, Yorktown Heights, NY This paper is supported in part by an NSF CAREER award CCR0306682 and a UC MICRO grant sponsored by Actel and Fujitsu.
Outline • Background on Resonance Noise • Algorithm • Experimental Results • Conclusions
Power Supply Noise Analysis resonance between on-chip capacitance and package inductance H(jw) resonance frequency fres ~100MHz I(jw) ω0 frequency
Important Characteristics of Resonance Noise • Resonance noise is significant when the spectrum of load current has harmonic components close to the resonance frequency. • It can be reduced by changing the spectrum of the load current such as changing the voltage or clock frequency • Usually occurs at a frequency (50MHz~200MHz) much lower than the clock frequency (GHz) • Usually occurs during certain instruction loops at runtime and is hard to detect during design-time. • It is impossible to cover the whole operation space • It is difficult to design a network that is reliable to multiple applications
Design stage techniques or runtime techniques? • There are many existing approaches for high frequency noise reduction at the design stage • P/G network sizing [Tan:DAC’99] • Topology optimization [Erhard:DAC’92] • Decap budgeting [Shi:Iccad’07] • Decoupling trench capacitance [Garofano’07] • However, to suppress the resonance noise effectively, we have to do it at runtime such as • Band-limited damping [Xu:ISSCC’07] • On-chip voltage regulator [Ang:ISSCC’00] • Single-shot transient suppressor
Retroactive or Proactive? • All the existing runtime techniques are retroactive • They can only function after the noise increases above the tolerance threshold • It takes quite a long time for the circuit to respond to the noise • A better approach can be to suppress the noise before it actually happens (proactively) • Accurate and efficient prediction of the load currents in the future • Runtime adjustment based on the prediction results. • In this paper, we use the clock frequency actuator • Adjust clock frequency dynamically to avoid resonance frequency
Resonance Noise Suppression by Frequency Actuator H(jw) resonance frequency fres ~100MHz I(jw) ω1 ω0 frequency
Outline • Background on Resonance Noise • Algorithm • Experimental Results • Conclusions
Overview of the algorithm • We gather the current data from the on-chip dynamic current sensors. • The load currents are modeled as triangular waveforms with uniform rising and falling time. • Only peak value of the currents need to be recorded. • Based on the data, we can apply linear filter and predict the load current in the coming a few clock cycles. • We use two kinds of filters (predetermined linear filter and adaptive filter) to allow tradeoff between accuracy and hardware cost. • Together with the RLC model of the P/G network and package, we can compute the noise profile at all ports. • Decide the optimal frequency according to the predicted load currents to minimize the harmonic component at resonance frequency
Predetermined Filter • We model the peak currents as a generalized Markov stochastic process over different clock cycles. • At clock cycle k, given M peak current data with L clock cycles interval Ik, Ik-L, Ik-2L, Ik-3L, … Ik-ML, we want to predict the peak current L clock cycles ahead • From the field of signal processing, we have • Predetermined filter has smaller complexity to build. It has larger prediction error, but with guaranteed convergence. • To improve accuracy, we may adjust ψi dynamically at runtime filter coefficients obtained from training data Adaptive filter
Adaptive Filter • Ik-L, Ik-2L, …., Ik-ML are the history peak current data • Ik is the predicted peak current • Ψ1, k-1, Ψ2, k-1, …, ΨM, k-1 are the adaptive filter coefficient • δΨ1, k-1, δΨ2, k-1, …, δΨM, k-1 are the correction for the adaptive filter coefficient • Adaptive filter is more complex. It has less prediction error, but may not converge.
Optimal Frequency Selection • We can predict peak currents in future L-1 clock cycles using the history data in M*L clock cycles by the two filters as • The detailed current waveform can then be recovered under the triangular waveform assumption as • The optimal clock frequency T can then be determined in two steps • First analyze the spectrum of u(t) for each permissible clock period T • Then select the one that has minimum value at the resonance frequency. unit triangular waveform
Outline • Background on Resonance Noise • Algorithm • Experimental Results • Conclusions
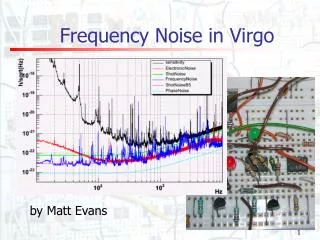
Current Prediction Results • LMS adaptive prediction has less prediction error in general • Predetermined filter can always guarantee the convergence
Resonance Noise Reduction Comparison • Compared with the baseline model without frequency actuator • the retroactive approach can only reduce the max noise by up to 14% and reduce the mean noise by up to 33% • our proactive approach with predetermined linear filter can reduce the max noise by up to 61%and the mean noise by up to 67% • the proactive approach with the LMS adaptive filter can reduce the max noise by up to 79% and the mean noise by up to 87%
Latency Overhead Comparison • The system latency for one time resonance noise violation is simulated such that one time reboot is required in the baseline case • The latency overhead includes • time of potential reboot • time of clock frequency • switches to avoid resonance noise and to increase clock frequency when the resonance is gone • time loss due to slowing down the clock • Latency overhead is normalized with respect to the ideal latencies for the baseline, retroactive and proactive cases. • Compared with the latency overhead of the baseline model, • the retroactive method reduces it by up to 35% • the proactive model with the predetermined linear filter reduces it by up to 74% • the proactive model with the LMS adaptive filter reduces it by up to 93%.
Area Overhead Comparison • We also compare the gate count from Cadence Encounter RTL Compiler • The gate count overhead is only around 0.05%-0.4% • The actuator based on adaptive filter requires about 2-4X more gates to implement than that based on the predetermined filter
Impact of the Number of Sensors • The noise reduction is almost the same when the number of current sensors is greater than 5%of the total number of system ports, which translates to 10 − 100 current sensors for a leading chip. • This suggests that there is no need to place many sensors for the measurement.
Conclusions • We develop a novel stochastic method to predict the future current load based on the knowledge of existing current profile. • A proactive frequency actuator is proposed to suppress resonance noise • on-chip programmable PLL • dynamic power supply current sensors • We develop an efficient controlling algorithm to judiciously select the runtime clock frequency so that • the resonance noise is contained below the tolerance bound • The impact on chip performance is minimum • Compared with baseline design without frequency actuator, experimental results show that significant resonance noise reduction can be achieved.