Download
1 / 48
520 likes | 719 Views
Raisonnement flou. Variables linguistiques et propositions floues Variables linguistiques Proposition floue générale Implication floue Raisonnement Flou Modus ponens classique Modus ponens généralisé Application du Modus ponens généralisé. Agé. Jeune. Très-jeune. 1. 0. Age.

E N D
Raisonnement flou • Variables linguistiques et propositions floues • Variables linguistiques • Proposition floue générale • Implication floue • Raisonnement Flou • Modus ponens classique • Modus ponens généralisé • Application du Modus ponens généralisé DESS TSI
Agé Jeune Très-jeune 1 0 Age Variable linguistique • Une variable linguistique est représentée par un triplet (V, XV, TV) • V : nom de la variable (age, taille, température, longueur,...) • XV : univers des valeurs prises par V (ℝ,...) • TV = {A1, A2, ...} : ensemble de sous-ensembles flous de XV, utilisés pour caractériser V. • Par exemple: (Age-Personne, [0,130], {Très-jeune, Jeune, Agé}) DESS TSI
Proposition floue • Proposition floue élémentaire : qualification « V est A » d'une variable linguistique (V, XV, TV) • Par exemple: « Age-personne est jeune » • Proposition floue générale : composition de propositions floues élémentaires de variables linguistiques qui peuvent être distinctes • Soit « V est A » p.f.e. de (V, XV, TV), et « W est B » p.f.e. de (W, XW, TW), • Exemples de proposition floue générale : • « V est A et W est B » • « V est A ou W est B » DESS TSI
Valeur de vérité d’une proposition floue • Proposition classique : valeur de vérité {0, 1} (FAUX ou VRAI) • Proposition floue : la valeur de vérité est un sous-ensemble flou à valeurs dans [0,1] • Valeur de vérité pA de « V est A » : fA fonction d'appartenance de A • Négation: « V n'est pas A » : pAc= fAc = 1-fA • Valeur de vérité p d'une proposition floue générale : agrégation des valeurs de vérité pA et pB de chaque proposition floue élémentaire • Le type d'agrégation dépend de la composition réalisée (et, ou,...) • Conjonction « V est A et W est B » : pAB= min(pA, pB) • Disjonction « V est A ou W est B » : pAB= max(pA, pB) DESS TSI
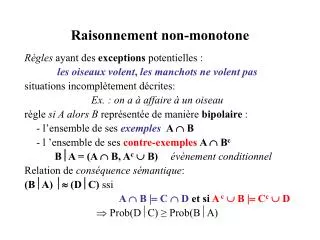
Implication floue • Règle de production : lien particulier (implication) entre 2 propositions floues • « V est A W est B » est lue « si V est A alors W est B » • « V est A » est la prémisse • « W est B » est la conclusion • Par exemple: « si Age-personne est Jeune alors Salaire est Bas » • Valeur de vérité de l'implication « V est A W est B » : évaluée par une fonction implicative fI : X x Y [0,1] • x X, y Y, fI(x, y) = (fA(x), fB(y)) • est une fonction [0,1]x[0,1] [0,1] qui est équivalente à l'implication classique quand les propositions sont classiques. DESS TSI
- Principales fonctions d'implication floue fI(x, y) = (A(x), B(y)) DESS TSI
Logique classique vs Logique floue DESS TSI
Mode de raisonnement classique • Modus ponens de la logique classique Règle: Prémisse Conclusion Observation: Prémisse-observée Déduction: Conclusion • Modus ponens : règle de déduction pour inférer de la connaissance Règle: H est humain H est mortel Observation: Socrate est humain Déduction: Socrate est mortel DESS TSI
Mode de raisonnement flou • Modus ponens généralisé : extension du MP aux propositions floues • Soient (V, XV, TV) et (W, XW, TW) deux variables linguistiques Règle floue: V est AW est B fA fB Observation floue: V est A' fA' Déduction: W est B' fB' • fA, fB, et fA' sont connus, on recherche la valeur de fB'(y), y Y DESS TSI
Modus ponens généralisé • Règle floue « V est AW est B » • Implication x X, y Y, fI(x,y)= (fA(x), fB(y)) • Le MPG combine la règle floue avec l'observation « V est A' » pour construire la conclusion B' • Opérateur de modus ponens généralisé : fonction T de [0,1]x[0,1] dans [0,1] pour combiner fI et fA' • T est une t-norme • T est liée à fI pour que le MPG soit compatible avec le modus ponens classique. • On a, pour tout y Y : fB' = supx X T(fI(x,y), fA'(x)) DESS TSI
Une règle DESS TSI
Plusieurs règles DESS TSI
Max-Min inférence : exemple DESS TSI
Max-Min inférence : autre exemple DESS TSI
Exemples d'opérateurs de MPG • Zadeh : u,v [0,1], T(u,v) = min(u,v) • Utilisé avec les implications de Mamdani, Larsen,... • Lukasiewicz : u,v [0,1], T(u,v) = max(u+v-1,0) • Utilisé avec les implications de Lukasiewicz, Reichenbach, Mamdani, Larsen,... DESS TSI
Applications du modus ponens généralisé • Commande floue : ensemble de règles floues + entrée numérique + sortie numérique • Contrôle flou de processus • Phase de défuzzification nécessaire • Systèmes experts flous : ensemble de règles floues + entrée floue + sortie floue • Raisonnement flou, inférence de connaissances • Pas de défuzzification • Raisonnement par analogie : ensemble de règles floues + entrée floue + sortie floue • B' est à B ce que A' est à A • ressemblance (A,A') doit être la même que ressemblance(B,B') DESS TSI
Imprécisions et incertitudes • Théorie des sous-ensembles flous • Modélisation des connaissances imprécises (« environ 20 ans ») ou vague (« jeune ») • traitement dans un même cadre des connaissances numériques et des connaissances symboliques • Ne permet pas de manipuler dans un même formalisme imprécisions et incertitudes • ce qui est très généralement lié : « je suis sûr que nous sommes en fin d'après-midi » mais « je ne suis pas certain qu'il soit exactement 17h30 » • De plus, un raisonnement basé sur des connaissances imprécises engendre souvent des incertitudes • « Mon train est à 9h32, si je pars de chez moi vers 9h quelle est la certitude que je puisse l'avoir? » DESS TSI
Théorie des possibilités • Introduite en 1978 par L. A. Zadeh (puis popularisée par Dubois et Prade), en liaison avec la théorie des sous-ensembles flous : • But: raisonner sur des connaissances imprécises ou vague, en introduisant un moyen de prendre en compte des incertitudes sur les connaissances. • Incertitudes non-probabilistes sur des événements : impossibilité d'évaluer correctement leur probabilité de réalisation. • « Serais-je en salle 506 lundi 24 Novembre à 14h ? » • Probabilité: ici, peu réaliste à évaluer • « Il est relativement possible que je sois dans cette salle, et c'est même assez certain. » DESS TSI
Mesure de possibilité • Soit un ensemble de référence fini X • On souhaite attribuer à chaque sous-ensemble de X (on parle alors d'événements) un coefficient compris entre 0 et 1 évaluant à quel point cet événement est possible. • Pour définir ce coefficient, on introduit une mesure de possibilité définie sur P(X), l'ensemble des parties de X, à valeur dans [0,1], telle que: • (∅)=0, et (X)=1 • (A,B) P(X)2, (A∪B) = max((A), (B)) Un événement esttout à fait possible si la mesure de sa possibilité est égale à 1. DESS TSI
Mesure de possibilité : propriétés • Une mesure de possibilité vérifie: • (A,B) P(X)2, (A∩B) ≤ min((A), (B)) • En particulier, l'occurrence simultanée de 2 événements possibles peut être impossible • Monotonie relativement à l'inclusion des parties de X • Si A B alors (A) ≤(B) • A P(X), max((A), (Ac)) = 1 • A P(X), (A) + (Ac) ≥ 1 DESS TSI
Mesure de nécessité • Une mesure de possibilité fournit une information sur l'occurrence d'un événement mais elle ne suffit pas pour décrire l'incertitude existante sur cet événement • (A) = 1 et (Ac)=1 peuvent être vérifiés en même temps: indétermination complète sur la réalisation de A. • On attribue à chaque événement un coefficientévaluant à quel point la réalisation de cet événement est certaine. • Pour définir ce coefficient, on introduit une mesure de nécessité N définie sur P(X), à valeur dans [0,1], telle que : • N(∅)=0, et N(X)=1 • ∀(A,B)∈ P(X)2, N(A∩B) = min(N(A), N(B)) DESS TSI
Mesure de nécessité : propriétés • Une mesure de nécessité vérifie: • (A,B) P(X)2, N(AB) ≥ max(N(A), N(B)) • Monotonie relativement à l'inclusion des parties de X • Si A B alors N(A) ≤ N(B) • A P(X), min(N(A), N(Ac)) = 0 • A P(X), N(A) + N(Ac) ≤ 1 DESS TSI
Relations possibilité / nécessité • Une mesure de nécessité N peut être obtenue à partir d'une mesure de possibilité par : • A P(X), N(A) = 1 - (Ac) • Plus un événement A est affecté d'une grande nécessité, moins son complémentaire Ac est possible. • On a de plus: • A P(X), (A) ≥ N(A) • A P(X), max((A), 1-N(A))=1 DESS TSI
Distribution de possibilité • Une mesure de possibilité est totalement définie • si on attribue un coefficient de possibilité à toute partie de X. • si on indique un coefficient seulement aux parties élémentaires de X, une partie quelconque étant l'union de parties élémentaires. • Une distribution de possibilité est une fonction définie sur X, à valeur dans [0,1], telle que : • supxX(x) = 1 • A partir d 'une distribution de possibilité , on construit une mesure de possibilité : • A P(X), (A) = supxA(x) DESS TSI
Possibilité de sous-ensemble flou • Possibilité et nécessité ont été introduites pour quantifier la certitude sur un événement, elles s'appliquent à des sous-ensembles ordinaires de X • Pour des sous-ensembles flous de X, on peut indiquer dans quelle mesure ils sont possibles et/ou certains, à partir d'une connaissance préalable donnée sur X. • Ainsi, étant donnée une référence, i.e. un s.e.f. A de X, un autre s.e.f. B de X sera d'autant plus acceptable qu'il sera compatible avec A. • On évalue alors la possibilité de B relative à A par : • (B; A)= supxX min (fB(x), fA(x)) • (B; A) mesure le degré maximal avec lequel un élément x de X peut appartenir à la fois à A et à B. DESS TSI
Nécessité de sous-ensemble flou • Étant donnée une référence, i.e. un s.e.f. A de X, un autre s.e.f. B de X sera d'autant plus acceptable qu'il sera compatible avec A. • On évalue alors la nécessité de B relative à A par : • (B; A)= 1- (Bc; A)= infxX max (fB(x), 1-fA(x)) • N(B; A) mesure le degré avec lequel B est inclus dans A. DESS TSI
Exemple • On représente le concept de « vitesse rapide » par un s.e.f. Sur l'espace des vitesses. • Une moto roule à env. 100km/h. • Questions: • Avec qu'elle certitude peut on dire que la moto roule avec une vitesse rapide? • Avec quel degré env. 100km/h signifie-t-il « vitesse rapide »? Rapide ~100 km/h 1 0 km/h 100 90 110 DESS TSI
0,6 0 km/h 100 90 110 Rapide ~100 km/h 1 0 km/h 100 90 110 Exemple : possibilité et nécessité (env.100; Rapide)= supxX min (fenv.100(x), fRapide(x)) = 0,6 ~100 km/h Rapide 1 (env.100; Rapide)= infx X max (fenv.100(x), 1-fRapide(x))= 0 DESS TSI
Apprentissage non supervisé • Étant donné un ensemble d'exemples (des points dans un plan, ...) • On ne connaît pas de classe à associer aux exemples • Il faut découvrir des classes, faire des regroupements d'éléments similaires • Clustering = construction de paquets DESS TSI
Méthodes de C-moyennes • Une des plus anciennes méthodes de clustering existantes (1967). Algorithme des C-means. • Partition d'une population • Affectation sans équivoque ( ou ) de chaque exemple à une classe • L'algorithme : • Sélection de c points (au hasard) : centroïdes. • Affectation de chaque exemple au centroïde le plus proche (distance). Constitution de clusters. • Calcul de nouveaux centroïdes : on prend la moyenne, composante par composante, pour tous les exemples d'un cluster. • Retour à l'étape 2 jusqu'à stabilisation des frontières entre les clusters. DESS TSI
C-moyennes: étape 1 DESS TSI
X X X X X X X X O X X O X X X X X X X X X X O X X X C-moyennes: étape finale X DESS TSI
Méthodes des C-moyennes: Inconvénients • Problèmes de prise en compte des variables non-numériques (nécessité de posséder une mesure de distance) • Traduction en valeurs numériques • Construction de matrices de distances • Problème du choix du nombre de centroïdes c • Problème du choix de la normalisation dans le calcul de la distance (même poids pour chaque composante) • Pondération, normalisation, agrégation DESS TSI
Méthode des C-moyennes floues • Généralisation de l'algorithme des C-moyennes • Partition floue des données • Fonctions d'appartenance aux clusters • Problématique : trouver une pseudo-partition floue et les centres des clusters associés qui représente le mieux la structure des exemples. • Utilisation d'un critère permettant de mesurer les associations fortes à l'intérieur d'un cluster, faibles à l'extérieur • Index de performance DESS TSI
Rappels • Pseudo-partition floue • Ensemble de sous-ensembles flous non vides {A1, A2,..,An} de X tel que: xX, • C-partition floue • Une c-partition floue (c>0) de X est une famille P ={A1, A2,..,Ac} de c sous-ensembles flous tels que : DESS TSI
C-moyennes floues Soit X={x1, x2, ..., xn} un ensemble de données où chaque xk peut être un vecteur: xk=(xk1, xk2,...,xkp) Étant donné une c-partition floue P= {A1, A2,..,Ac}, les c centres v1, v2,..., vc associés à chaque cluster flou sont calculés par : Avec mℝ, m > 1, influence des degrés d'appartenance. • vi: centre du cluster flou Ai • Moyenne pondérée des données de Ai • Le poids d'une donnée xk est la puissance mième de son degré d'appartenance à Ai. DESS TSI
Index de performance d'une partition floue • Soit la c-partition floue P= {A1, A2,..,Ac}, son indice de performance est défini par: • Avec ||.||: norme sur ℝp qui permet de mesurer la distance entre xk et vi • Plus Jm(P) est faible, meilleure est P DESS TSI
Algorithme de Bezdek (1981) • Algorithme d'optimisation d'une partition floue: algorithme des c-moyennes floues (Fuzzy c-means). • Hypothèses: • C connu, • On possède une distance (mesure), • Un réel m ]1,+∞[ est donné, • Un nombre positif ℇ petit est donné (critère d'arrêt). DESS TSI
Algorithme de Bezdek • Etape 1:Soit t=0, sélectionner une partition floue initiale P(0). • Etape 2: Calculer les c centres v1(t), v2(t),...,vc(t) pour P(t) grâce à (1) • Etape 3:Mise à jour de P(t) pour construire P(t+1): xkX, • Si alors • si pour quelque iI ℕc , alors on définit pour iI par tout nombre réel >0 tel que: et on définit pour tout iℕc-I • Etape 4:Comparer P(t) et P(t+1) • Si |P(t) - P(t+1)| ≤ ℇ alors on s'arrête, sinon on incrémente t et on retourne à l'étape 2. On a : (distance entre les partitions) DESS TSI
Arithmétique floue - Intervalles et nombres flous • Un sef F est convexe si • (x, y)RxR, z [x,y], fF(z)min(fF(x), fF(y)) • Propriété équivalente au fait que toute –coupe de F est une partie convexe de R. • Quantité floue : sef normalisé de R. • Intervalle flou : quantité floue convexe • Nombre flou : intervalle flou de fonction d’appartenance semi-continue supérieurement et de support compact. 1 0 R a m b DESS TSI
Addition floue DESS TSI
Arithmétique floue – Intervalles flous de type L-R (1) • Quantité floue I dont la fonction d’appartenance dépend de 4 paramètres (m,m’,a,b) et de 2 fonctions L er R telles que : • L(0)=R(0)=1 • L(1)=0 ou L(x)>0 x avec limx L(x)=0 • R(1)=0 ou R(x)>0 x avec limx R(x)=0 • I=(m,m’,a,b)LR DESS TSI
Arithmétique floue – Intervalles flous de type L-R (2) • Cas particulier : nombre flou I=(m,a,b) LR avec m=m’. • Fonctions L et R particulières : L(x)=R(x)=max(0,1-x) pour des intervalles flous trapézoïdaux ou des nombres flous triangulaires. DESS TSI
Arithmétique floue – Opérations sur les L-R • I=(m,m’,a,b)LR J=(n,n’,c,d)LR alors : • -I=(-m’,-m,b,a)RL • I J = (m+n, m’+n’, a+c, b+d)LR • I J = (m-n’, m’-n, a+d, b+c)LR si L=R DESS TSI
Fonction appliquée à un nombre flou DESS TSI