Download
1 / 20
200 likes | 204 Views
This study focuses on the effect of seismic exploration on sperm whales in the Gulf of Mexico. The study involves tracking tagged and untagged animals using 3D tracking methods. The goal is to collect statistically significant samples of dive profiles under tagging/seismic conditions. The study also utilizes towed arrays and bottom-mounted sensors for data collection.

E N D
MMS Minerals Management Service Sperm whale seismic study in Gulf of Mexico-acoustics focus • General background • My role: 3D tracking tagged/untagged animals—working a few months at a time • Single array localization-2000 • Tag/array integration-2001 • Dual-array localization-2002-? • Upcoming plans Aaron Thode, Marine Physical Lab, SIO, UCSD Marine Fisheries Service
Background-SWAMP cruises 2000-2001 • Sponsors • Minerals Management Service • International Association of Geophysical Contractors • Marine Fisheries, SE, 2000-2001 • Focus: effect of seismic exploration on sperm whales • Endangered species • Acoustically active • “Resident” populations • Mississippi Canyon • De Soto photo: Keith Mullin, SE Fisheries Service
Present SWSS study centers on two types of tags • Bruce Mate’s satellite tag (STAG) • Long duration deployments—long-term habitat shift? • Over 15 animals tagged, mostly on one day • WHOI digital recording tag (DTAG) • Also pressure, orientation, acceleration • High-resolution behavioral responses, energy studies, 3D pseudeotracks • Visual, biopsy, acoustic component • Nineteen animals tagged in 2002, three simultaneously under controlled seismic exposure, many more under uncontrolled exposures.
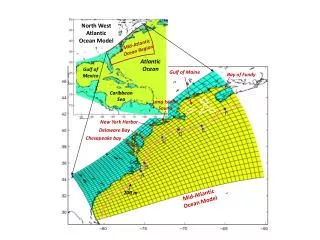
Gulf of Mexico an acoustically unfavorable propagation environment
Measured and computed detection ranges predict 3-10km, depending on source depth Source: MATLAB KRAKEN (should also Be repeated With Bellhop) Three different towed array systems 30-100m depth, give ~6km range
Bottom-mounted sensors have similar predicted ranges Stennis Space Center (George Ioup) has placed bottom-mounted sensors in general vicinity of SWSS. Some coordination, little overlap so far.
To date passive acoustic data collection program uses towed arrays with few elements->close range work Outgrowth of Jay Barlow work, SWFSC. Also arrays from Ecologic, WHOI
My focus has been tracking untagged animals, under various conditions • Goal: statistically significant samples of low-resolution dive profiles under tagging/seismic conditions • Complements high-resolution low volume tagging runs. • Three branches: • Single array localization-2000 • Tag/array integration-2001 • Dual-array localization-2002-?
s t d b SWSS acoustic work involves close follows at slow speeds NOAA ship Gordon Gunther 0.5-1.5 kts 930 m • Overnight tracking allowed biopsy, tagging in morning • July 3 typical-slow tow through middle of traveling pod • Silty/muddy flat bottom, depth measured with fathometer • Pod composition assumed to be females and juveniles• TDR was NOT attached during this particular sequence
tdt tdb tds Bearing 1 Bearing 2 q R za a zw
Example from one dive: • Good depth resolution from 100 m depth • Range uncertainty increases with animal depth • Tracking ends when bottom returns vanish
Ray refraction may be neglected for ranges less than 1 km True range (m)
During first stage of dive cycle inter-click interval is closely related to two-way travel time from whale to bottom. • During second stage bottom bounces vanish and timing becomes irregular. • Why so many clicks related to bottom? (New Zealand counterexample)
Some work has been performed on merging tag/array data • Simultaneous recordings on tag/array corrects pseudotrack. • Acoustics does not have control of ship during most tagging operations, with interesting results. Array bearing (deg) Time (sec)
The inter-click interval (ICI) used to identify tagged whale out of 7-13 other animals
Using surface reflections only gives three different time-of-arrivals, with two arrays Ishmael display: David Mellinger
Two arrays can eliminate need for bottom reflection, if array depths measured • Restrictions: • Array depths known (difficult!) • Depths > 40 m (slow towing speed) • Doesn’t work broadside. • Assumes straight-line propagation
Sept. 5 proof-of-concept trial demonstrated results Range vs. time broadside endfire Depth vs. time ● Array depth had to be estimated for one array. ●Measured descent rate of 91 meters per minute, similar to 88 meter per minute measurements from next-day tag.
Two arrays plus tag refines localization-”leverages” tag info 2001-Array depths still the bug-bear!
Everything seems up in the air, as opposed to in the water • What ship for seismic playback? • There was a lot of uncontrolled seismic exposures in 2002 • What ship for research? • Last year’s ship was way too noisy • What “holes” are there? • The off axis acoustic signature of seismic vessels is not known. • Modeling by IAGC free-space only, no waveguide effects included. • Better arrays needed • Bottom-mounted sensors? Stennis?