Download
1 / 36
360 likes | 498 Views
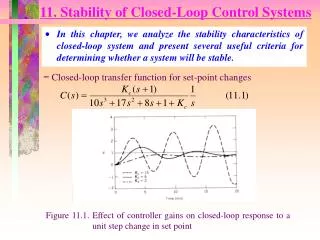
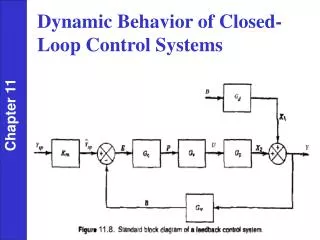
Towards Patient Safety in Closed-Loop Medical Device Systems. Authors David Arney , Miroslav Pajic , Julian Goldman, Insup Lee, Rahul Mangharam , Oleg Sokolsky Presenter Velin Dimitrov. Need. Nurses and other clinicians deal with a multitude of tasks

E N D
Towards Patient Safety in Closed-Loop Medical Device Systems Authors David Arney, MiroslavPajic, Julian Goldman, Insup Lee, RahulMangharam, Oleg Sokolsky Presenter Velin Dimitrov
Need Nurses and other clinicians deal with a multitude of tasks They need to quickly assess dangerous situations and take preventive action Delays are life-threatening Adding autonomy to medical devices will relieve the burden on nurses
Typical Clinical Setting The clinician “closes the loop” Alarm sounds when sensor passes threshold Clinician arrives to assess the situation Clinician must first acquaint themselves Clinician takes action
Proposal What if devices themselves could sense common fault/dangerous conditions and respond more quickly than a clinician could? Human caregiver will always be in the loop!
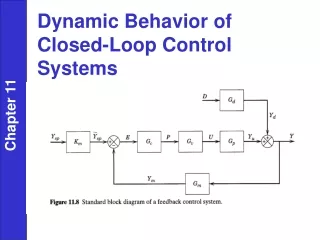
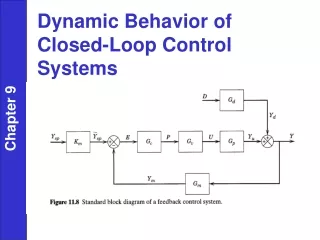
Two Models • Formal, timed automata based model • UPPAAL tool • Exhaustively test system behaviors in failure mode • Timing constraints from dynamic model • Detailed, informal model • Simulink/MATLAB • Captures dynamics of human/device interaction
Case Study MD PnP and ICE Architecture
Clinical Use Case • Patient Control Analgesia (PCA) pump • Provide pain meds to patient • Customized dosing • Programmed limits on how many doses can be delivered
Modes of Failure Mis-programming Overestimation of maximum dose Wrong concentration Accidental pressing of button These failures cannot be currently avoided
PCA Pump • Programmed by caregiver • Normal rate of infusion • Increased rate of bolus • Bolus total duration • Drug limit • Built in sensors to catch device faults • Network interface for status • No pumps can currently accept control sigs
Pulse Oximeter Measure SpO2 and HR Finger clip sensor Ratio of IR to red light Amplitude
Patient Model • Pain, Pain-controlled, Overmedicated • Critical Region • Overdose, Respiratory distress • SpO2 <70%, HR <11.5 bpm • Drug level is a linear mapping to HR and SpO2 in this model
Supervisor Model Decides when to stop pump to keep patient out of critical region Clinical application script (CAS) Alarming Region Sp02 <90% or HR <57 bpm Notify caregiver – Alarming condition
Verification and Validation Will the system function correctly? Finding faults and recovering gracefully
Verifying Safety Properties Check that the pain eventually goes up in the model Check that the pump is stopped in the alarming condition
Informal, Detail Simulink Models Used to determine the timing/rate parameters that make the system safe Models patient dynamics, network delays, pump delays
Safety Requirement PCA pump will always be stopped before we reach critical condition
Comparing Time Delays to tcrit alpha is 0.001s^-1 Half life of drug is 11.5 minutes For H1 = 90% and H2 = 70% Tcrit = 26.8 minutes
Network Delay Tolerance Supervisor control algorithm and pump design must maintain open-loop stability Essentially adding capability to limit given dose per command from the supervisor – activation command
t_del Disregard button pressed for tdel time units t_del must be less than t_safe for this to work
t_safe t_safe must satisfy the following condition
t_safe dl_max= 100, Hdl_2 = 85.71, Hdl_1 = 28.57, dl_cur = 20 This corresponds to alarm/critialcond t_safe = 1723 sec
Retrofittable Solution Supervisor dynamically sets max drug level
Related and Future Work Alaris 8210 SpO2 mdoule connects to Alaris 8000 pump controller Tightly integrated system from single vendor Need good model that captures whole process of drug delivery Pharmacokinetic models are not sufficient