Download
1 / 17
170 likes | 260 Views
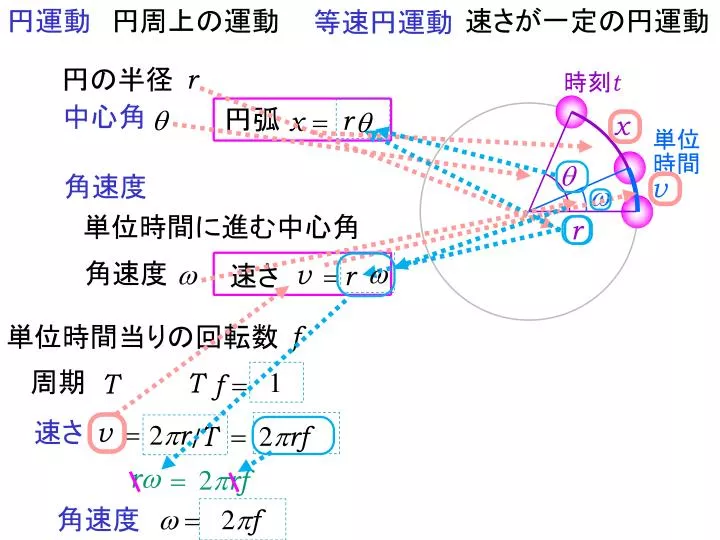
円運動. 円周上の運動. 速さが一定の円運動. 等速 円運動. 円の半径. r. 時刻 t. 中心角. 円弧. q. r. x =. q. x. 単位 時間. q. 角速度. v. w. 単位 時間 に 進む中心 角. r. 角速度. w. v. w. 速さ. =. r. f. 単位時間当り の回転数. 周期. 1. T. T. f =. 速さ. v. =. 2 p r. =. 2 p rf. T. /. r w. =. 2 p rf. 角速度. w =. 2 p f. 角速度 w.

E N D
円運動 円周上の運動 速さが一定の円運動 等速円運動 円の半径 r 時刻t 中心角 円弧 q r x = • q x 単位 時間 q 角速度 v w 単位時間に進む中心角 r 角速度 w v w 速さ = r f 単位時間当りの回転数 周期 1 T T f = 速さ v = 2pr = 2prf T / rw = 2prf 角速度 w = • 2pf
角速度w 半径r 速さ v = rw 円の半径 r 中心角 円弧 q r x = • q 角速度 単位時間に進む中心角 角速度 w v w 速さ = r f 単位時間当りの回転数 周期 1 T T f = 速さ v = 2pr = 2prf T / 角速度 w = • 2pf
角速度w 等速円運動物体の加速度 半径r 速さ v = rw
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 運動に伴って速度ベクトルも 方向が変わる 速度 ベクトル
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 運動に伴って速度ベクトルも 方向が変わる 速度 ベクトル 速度ベクトルの 変化を見るため 始点を一点に集めてみよう。 このような図をホドグラフという。 ホドグラフ 速度ベクトル の始点を 一点に集め たもの
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 物体が一周する間に 速度 ベクトル ホドグラフのベクトルも 一回転する。 ホドグラフ 速度ベクトル の始点を 一点に集め たもの
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 物体が一周する間に 速度 ベクトル ホドグラフのベクトルも 一回転する。 同時に見ると ホドグラフ 速度ベクトル の始点を 一点に集め たもの
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 速度の変化の割合 =加速度 単位 時間 加速度の大きさ w a = = = / v r v rw w v • 2 • 2 v w r a = w v a w ホドグラフ v w 速度ベクトル の始点を 一点に集め たもの
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 速度の変化の割合 =加速度 単位 時間 加速度の大きさ / a = = = r v rw w v • 2 • 2 v w a r v 加速度ベクトルa a v ⊥r ⊥ ⊥ r r a//r 位置ベクトルr a = rw2 - 向心加速度 a a v ⊥ a w ホドグラフ v w 速度ベクトル の始点を 一点に集め たもの
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 速度の変化の割合 =加速度 単位 時間 加速度の大きさ / a = = = r v rw w v • 2 • 2 v w a 加速度ベクトルa a v ⊥r ⊥ r r a//r 位置ベクトルr a = rw2 - 向心加速度 例 速さv=10m/sの自動車が 向心加速度 半径r=20mのカーブを走る。 w a 0.5/s = v 角速度 w = • /r 角速度 w 向心加速度 =5.0m/s2 • v2/r a =
角速度w 等速円運動物体の加速度 半径r 速さ v = rw 向心加速度 a=-rw2 速度の変化の割合 =加速度 • a=vw=rw2=v2/r 加速度の大きさ a⊥v⊥r v / a = = = r v rw w v v • 2 • 2 v w a w a 加速度ベクトルa a v ⊥r r ⊥ r r a//r 位置ベクトルr a = rw2 - 向心加速度 例 速さv=10m/sの自動車が 向心加速度 半径r=20mのカーブを走る。 a 0.5/s = v 角速度 w = • /r w 角速度 向心加速度 =5.0m/s2 • v2/r a =
角速度w 等速円運動の運動方程式 半径r 速さ v = rw 向心加速度 a=-rw2 向心 張力、 引力、 力F • a=vw=rw2=v2/r 拘束力、 摩擦力 等 a⊥v⊥r v 物体の質量m v F 質量m 向心力F w a • =mrw2=mv2/r 力=質量×加速度 運動方程式 運動方程式 F r ma m • v2/r m rw2 = = = F 路面が水平なら、向心力は ハンドルを切ったときの 路面からの摩擦力による。 例 速さv=10m/sの自動車が 向心加速度 半径r=20mのカーブを走る。 a 0.5/s = v 角速度 w = • /r F w 角速度 向心加速度 =5.0m/s2 • v2/r a = 向心力の大きさは ma • v2/r = m = 4000N = F
角速度w 水平面内の円運動物体の傾き 半径r 速さ v = rw 向心加速度 a=-rw2 例 速さv=10m/sの自動車が • a=vw=rw2=v2/r 半径r=20mのカーブを走る。 a⊥v⊥r 路面が傾いているため、 摩擦なしにカーブしている。 v v F 質量m 向心力F w a • =mrw2=mv2/r 運動方程式 F r 路面の傾きqはいくらか。 路面が水平なら、向心力は ハンドルを切ったときの 路面からの摩擦力による。 例 速さv=10m/sの自動車が 向心加速度 半径r=20mのカーブを走る。 a 0.5/s = v 角速度 w = • /r F w 角速度 向心加速度 =5.0m/s2 • v2/r a = 向心力の大きさは ma • v2/r = m = 4000N = F
角速度w 水平面内の円運動物体の傾き 半径r 速さ v = rw 向心加速度 a=-rw2 例 速さv=10m/sの自動車が • a=vw=rw2=v2/r 半径r=20mのカーブを走る。 a⊥v⊥r 路面が傾いているため、 摩擦なしにカーブしている。 v v F 質量m 向心力F w a • =mrw2=mv2/r 運動方程式 F r 路面の傾きqはいくらか。 向心力は重力と垂直抗力の合力 q 質量m、重力加速度をgとする。 mg tanq 図より、向心力は m • v2/r q mg tanq 運動方程式 = mg ∴ = tanq = • v2/rg 27° • q = 0.510
遠心力 円運動する物体上から見ると 円の中心から遠ざかる方向に 見かけの力が働く。 この見かけの力を遠心力という。 遠心力の大きさ= • 外から見た向心力の大きさ 遠心力の方向= • 外から見た向心力と反対 外から見るとき 物体上から見るとき 見る人 自動車は向心力と遠心力 を受けて釣り合って静止 自動車は向心力を 受けて円運動 人は遠心力を受けて運動 中の人は慣性で直線運動
角速度w 人工衛星 半径r 速さ v = rw a = -rw2 向心加速度 人工衛星の質量をm 速さをv a = vw = rw2 = • v2/r 人工衛星軌道半径をx a ⊥ v ⊥ r 地球の質量をM 半径をR v v 質量m w 力F a 万有引力定数をGとする。 運動方程式 = m • v2/r r F F より 運動方程式 地上での を使うと 地表に近い軌道なら x=R 周期
角速度w 円運動の座標による記述 半径r 速さ v = rw a = -rw2 向心加速度 y v a = vw = rw2 = • v2/r a a ⊥ v ⊥ r v v 力F r 質量m w 力F q a 運動方程式 = m • v2/r r x F F 時間をt とする wt 中心角 q= = r coswt x = r cosq 座標 = r sinwt y = r sinq v ⊥ r -wr sinwt vx= 速度 v = rw wr coswt vy= a ⊥ v -w2r coswt 加速度 ax= a a = -rw2 = rw2 ay= -w2r sinwt
