Download
1 / 34
340 likes | 347 Views
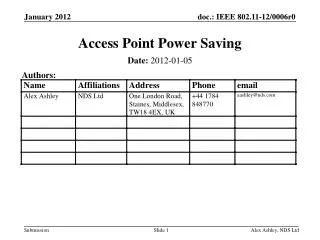
Easy-Access Power Dome. Arjun Khetarpal Rushi Kothari TA: Zuhaib Sheikh. Introduction Objectives. To create a device with multiple touch-sensitive regions, which wirelessly communicates with a receiver which allocates power to various appliances.

E N D
Easy-Access Power Dome Arjun Khetarpal Rushi Kothari TA: Zuhaib Sheikh
IntroductionObjectives • To create a device with multiple touch-sensitive regions, which wirelessly communicates with a receiver which allocates power to various appliances. • To help individuals with mobility impairments to function more independently.
IntroductionBenefits • Provides greater independence to individuals with limited mobility. • Creates a safer environment for users, as difficult to reach switches can often be a hazard, especially for those with limited mobility. • Does not require effort to press or flip, as typical switches and buttons often require more strength and mobility than an individual might be capable of. • Wireless implementation prevents hazardous and messy setup that comes with a wired device.
Dome-Side Router-Side Thermal sensing power dome with four touch regions Appliance 1 Appliance 2 Dome-Side Microcontroller Appliance 3 Appliance 4 RF Transmitter Easy-Access Power Dome IntroductionInitial Design Outline Power Router Router-Side Microcontroller RF Receiver
IntroductionFinal Design Outline Sensor-Side Relay-Side Four touch sensing electrodes Relays & Fuses Appliance 1 Appliance 2 Sensor-Side Microcontroller Relay-Side Microcontroller Appliance 3 Appliance 4 Sensor-Side RF Transceiver Relay-Side RF Transceiver Easy-Access Power Dome
IntroductionFeatures • Four touch-sensing surface regions allow for users to apply the slightest touch in order to activate up to four desired appliances simultaneously. • LED display on relay-side indicates which appliances are receiving electricity. Feedback mechanism checks that the appliance is activated, and sensor-side LED display indicates that appliance is functioning. • Wireless RF communication between power dome and power router allows for a no risk environment, as wires can often become tangled and difficult to install. • Portable: Power dome is mobile enough to be transported, but large enough for easy access touch regions.
DesignHardware Overview • 2 x PIC16F877A Microcontroller • 2 x TRM-433-LT RF Transceiver • 4 x QT100A Capacitive Touch-Sensor • 4 x W171DIP-2 Reed Relay • 2 x F1100E 20MHz Oscillator • 2 x UA78M33C 3.3V Voltage Regulator
DesignReasons for using QT100A • Small, low-cost package for detecting touch. • Sensitivity can be adjusted by altering capacitor values • Low-power consumption mode saves battery life. • Challenge: Unfortunately the 10-pin MSOP package is no longer manufactured, so the 6-pin WSON chip was very difficult to connect.
TestingSensors • Because we received a 6-pin WSON that was only a few millimeters in size, we were unable to solder pins to it successfully. Our PCB was finally fabricated after the demonstration. • We were able to successfully implement the sensor afterwards. • More refining is needed, but it shows that our sensors are working, and we simply needed to connect four of them into our circuit. • Below is an early capture of response from the sensor. We are quickly tapping the electrode, and one can see the response on the oscilloscope.
DesignReasons for using W171DIP-2 • Challenge: To implement a set of relays that can connect to our PIC. Mechanical relays require large input currents that the PIC cannot supply. • Solution: Reed relays can be directly connected to the PIC without using a BJT current amplifier circuit. • The W171DIP-2 only draws 10mA, while the PIC is able to supply up to 25mA. • The relay has a maximum current rating of 10A, which is protected by a set of 10A fuses. • Characteristics: Turn-on voltage = 2.6V, Turn-off voltage = 2.1V
DesignReasons for using TRM-433-LT • Initially TXM-433-LR and RXM-433-LR • Sensor-side transmits data and relay-side receives data • No feedback system implemented • TRM-433-LT • Both transmit and receive capabilities, which are necessary due to our feedback system • Power-down mode; useful for saving battery • Challenges: • Only one frequency channel, resulting in interference from other projects. • Switching between transmit and receive is not trivial to implement for feedback system.
Design Reasons for using PIC16F877A • Cost-effective solution for our purposes • USART/RS-232 lines implemented for interfacing with RF transceivers • To be used for taking input from four sensors, RF communication, and providing output to four relays • Challenge: Implementing a scheme which would turn on one of four appliances depending on which sensor was touched.
DesignSensor-side PIC, transmission, and reception • Solution: Four input sensors send four distinct bytes of data: • Sensor 1: 0xD8 = 0b11011000 • Sensor 2: 0xD9 = 0b11011001 • Sensor 3: 0xDA = 0b11011010 • Sensor 4: 0xDB = 0b11011011 • We set values in the PIC code in reverse order (e.g. 0b11011000 0x00011011), as the transmit line reverses it back to normal when sending. • Transmitter side is actively high, and receives a ‘0’ before it starts sending data. After data is sent, goes back to ‘1’. • Receiving module has small “data-on-line” pulse followed by a ‘0’ to indicate that ready to receive. Then data is received.
TestingSensor-side PIC, transmission, and reception Line 1 (top) is Data Out (TX) pin of sensor-side PIC Line 2 (bottom) is Data In (RX) pin of relay-side PIC Sensor 1 – 0xD8 (1101 1000) 1 1 0 1 1 0 0 0 1 1 0 1 1 0 0 0 Data-on-line pulse
TestingSensor-side PIC, transmission, and reception Sensor 2 – 0xD9 (1101 1001) Sensor 3 – 0xDA (1101 1010) 1 1 0 1 1 0 0 1 Data-on-line pulse 1 1 0 1 1 0 0 1 1 1 0 1 1 0 1 0 Data-on-line pulse 1 1 0 1 1 0 1 0
TestingSensor-side PIC, transmission, and reception Sensor 4 – 0xDB (1101 1011) 1 1 0 1 1 0 1 1 Data-on-line pulse 1 1 0 1 1 0 1 1
PerformanceResponse Time • Challenge: To run our circuit with low power-consumption, while maintaining a 150ms response time. • Our transmitter is brought up from a powered-down state before transmission, and we can see that the time it takes for the appliance to turn on is: 85ms (worst case sensor response time on low-power) +10ms (power-up transceiver) + 8ms (transmit/receive data) + negligible delay for PIC to manipulate data = 103 milliseconds + 8ms (transmit/receive feedback) = 111 milliseconds
Design Feedback • We implemented a feedback method into our device. Once data is received at the relay-side PIC, the data sequence for the activated appliance is sent back to the sensor-side PIC. LEDs change accordingly to reflect the actual status of the device. • The transceivers both contain a T/R Select pin controlled by the PIC. When low, the transceiver is set to receive, and when high, it is set to transmit.
PDN = 0 Receive Sensor Input LED = 1 LED = 0 Initialize transmitter sequence T/R Select = 1 PDN = 1 Determine current LED status of appropriate appliance Decode sensor identification data Send RS-232 data to sensor-side transceiver Detect data initialization sequence T/R Select = 0 Receive input from sensor-side transceiver DesignSensor-Side Feedback Algorithm 0 1 0 1
Receive input from relay-side transceiver T/R Select = 0 Detect data initialization sequence Decode appliance identification data Send output to relay-side transceiver Check current status of appliance T/R Select = 1 Corresponding relay = 0 Corresponding relay = 1 DesignRelay-Side Feedback Algorithm 1 0
TestingSensor-Side Feedback • Here we can see data being sent from sensor input on oscilloscope line I (top). • Oscilloscope line 2 (bottom) shows the T/R select line. Immediately after data is sent, the T/R select line goes low to set the transceiver into receive mode. • The T/R select line goes back high after about 1 second.
TestingSensor-Side Feedback • Below is the capture of the sensor-side transceiver being switched into receive mode ( the same signal as on the previous) slide. However, now the oscilloscope is connected to the receive pin of the PIC. We can see feedback data being received from the relay-side.
TestingRelay-Side Feedback • Here the relay-side PIC can be seen switching to transmit mode after receiving data (not shown). During the T/R select high phase, data is sent, and the line returns to low (receive).
Major ChallengeFunctionality Issue • As shown in the demonstration, we were unable to get our PIC to decode the incoming data in lab conditions, even after much time spent looking from various angles at the issue. • Our receiving PIC code included an algorithm which waited until the “data-on-line” pulse is found (kbhit command), and then checked for the initiation sequence ‘110110’ present in all of our signals. Then it reads the last two bits to determine which of the four appliances to supply power.
Major ChallengeTheoretical Cause • The most probable reason for our issue is that noise was fooling our receive code into thinking it was the initiation sequence (would explain why our relays received so many false signals and the output LEDs flickered). • The length of a ‘1’ or ‘0’ is approximately 0.75 milliseconds from the PIC/transmitter, but noise is many orders of magnitude shorter. Thus, maybe the receiving PIC interpreted that incorrectly as ‘1’ or ‘0’ when we didn’t want it to.
PerformancePower Consumption • QT100A • Current draw of 600µA in most applications when running in Fast response mode • Current draw of 6-12µA in Low Power mode • Sinks up to 2 mA of current • TRM-433-LT • Transmit mode draws 10mA • Power-down mode draws ~0mA • PIC16F877A • Max current sink/source of 25mA per port • W171DIP-2 • Draws 10mA of current from PIC.
PerformanceBattery Life • Because our device runs partially on battery power, we want to ensure that the battery life is as long as possible. • Run QT100A in low-power mode • Power-down transceiver when not used • Calculations (powered up and transmitting data): • Capacity of battery = 500 mAh • Battery life = Capacity ÷ Current Drawn • Current Drawn = PIC(25mA) + Transceiver(12mA) + Regulator(6mA) + Sensor(.6mA) • 500mAh ÷ 43.6mA = 11.47 hours • Note that with transceiver powered down, 0mA are drawn. And with sensor on low-power mode, considerably less than .5mA is drawn.
PerformancePower Distribution • Relay side receives power from a 120VAC to 5VDC adapter. • Voltage regulated to 3.3VDC • Receptacles are powered by relays through 10A fuses. • Relays receive input from 120VAC wall outlet.
Ethical Considerations • We have constructed our design with ethical considerations in mind. As our design is specifically created to improve the quality of life of those in need, safety and ethical issues are at a forefront of our project. • We created a battery powered dome in order to make our design more convenient for individuals with motor impairments. • Additionally, we made sure that our wireless design allows for a safer environment for the user.
Further Development • Use a larger touch sensor than the QT100A, which was not ideal for development with student resources. • Further develop noise reduction processes to ensure data integrity. • Create longer data sequences to include more reliable initiation sequences. Also develop a termination sequence and checksum for data accuracy.
Commercial Viability • Needs more development in sequence decoding and power distribution. • Develop PCB layout for more compact and cleaner circuit. • Needs functional and aesthetically pleasing electrode configuration. • Use multi-channel transceivers, capable of transmitting over less used frequencies.