Download
1 / 33
340 likes | 791 Views
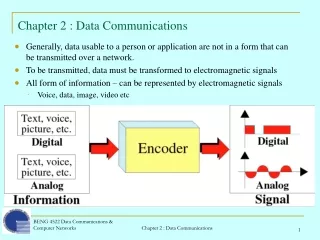
Principles of Communications Chapter 2 Signal and System. Assist. Prof. Tharadol Komolmis Department of Electrical Engineering, Faculty of Engineering, Chiang Mai University. ลักษณะสัญญาณ. ลักษณะสัญญาณ สัญญาณแอนะลอก ( Analog signal) สัญญาณดิจิตอล ( Digital signal)

E N D
Principles of CommunicationsChapter 2 Signal and System Assist. Prof. TharadolKomolmis Department of Electrical Engineering, Faculty of Engineering, Chiang Mai University
ลักษณะสัญญาณ • ลักษณะสัญญาณ • สัญญาณแอนะลอก (Analog signal) • สัญญาณดิจิตอล (Digital signal) • สัญญาณรบกวน (Noise) • ลักษณะสัญญาณแบ่งตามคาบ • สัญญาณรายคาบ (Periodic signal) • สัญญาณที่ไม่เป็นรายคาบ (Non-periodic signal) 252342 Chapter_2
ลักษณะสัญญาณ v(t) t สัญญาณแอนะลอก v(t) t สัญญาณดิจิตอล v(t) t สัญญาณแรนดัม 252342 Chapter_2
v(t) T=2p/w A Acosf t f/w สัญญาณและการวิเคราะห์ • สัญญาณรูปแบบซายน์ v(t)=Acos(2ft+f) 252342 Chapter_2
สัญญาณและการวิเคราะห์สัญญาณและการวิเคราะห์ • การวิเคราะห์สัญญาณทางเวลา • ค่าเฉลี่ยและกำลังเฉลี่ยของสัญญาณ • รากที่สองของค่ากำลังสองเฉลี่ย (ค่า rms) • การวิเคราะห์ทางความถี่ (วิเคราะห์สเปกตรัม) • อนุกรมฟูเรียร์และการวิเคราะห์สัญญาณรายคาบ • สัญญาณรูปแบบซายน์ กับอนุกรมฟูเรียร์ • Parseval'spower theorem • การแปลงฟูเรียร์และการวิเคราะห์สัญญาณที่ไม่เป็นรายคาบ • สัญญาณพลังงานและการแปลงฟูเรียร์ • Rayleigh's energy theorem • คุณสมบัติและทฤษฎีบทที่สำคัญบางประการของการแปลงฟูเรียร์ 252342 Chapter_2
สัญญาณและการวิเคราะห์สัญญาณและการวิเคราะห์ • การวิเคราะห์สัญญาณทางเวลา ค่าเฉลี่ย = ? ค่าเฉลี่ยของสัญญาณคือองค์ประกอบกระแสตรง (DC) 252342 Chapter_2
สัญญาณและการวิเคราะห์สัญญาณและการวิเคราะห์ • การวิเคราะห์สัญญาณทางเวลา กำลังเฉลี่ย = ? กำลังสองของค่าเฉลี่ย=กำลังขององค์ประกอบ DC ตกคร่อมตัวต้านทาน 1 โอห์ม ค่ากำลังสองเฉลี่ย=กำลังเฉลี่ยทั้งหมดของสัญญาณ ตกคร่อมตัวต้านทาน 1 โอห์ม 252342 Chapter_2
สัญญาณและการวิเคราะห์สัญญาณและการวิเคราะห์ • ค่าเฉลี่ยของสัญญาณคือองค์ประกอบกระแสตรง (DC) • กำลังสองของค่าเฉลี่ย=กำลังขององค์ประกอบ DC ตกคร่อมตัวต้านทาน 1 โอห์ม • ค่ากำลังสองเฉลี่ย=กำลังเฉลี่ยทั้งหมดของสัญญาณ ตกคร่อมตัวต้านทาน 1 โอห์ม • รากที่สองของค่ากำลังสองเฉลี่ยคือค่า rms ค่า rmsมีความสำคัญอย่างไร ? 252342 Chapter_2
สัญญาณและการวิเคราะห์สเปกตรัมสัญญาณและการวิเคราะห์สเปกตรัม • สัญญาณรูปแบบซายน์และเส้นสเปกตรัม 2cos25t 4cos2t cos24t t 4cos2t+cos24t+2cos25t f -5 -4 -3 -2 -1 1 2 3 4 5 252342 Chapter_2
สัญญาณและการวิเคราะห์สเปกตรัมสัญญาณและการวิเคราะห์สเปกตรัม • ขบวนพัลส์สี่เหลี่ยม ความกว้าง คาบ T0 • เส้นสเปกตรัมของสัญญาณขบวนพัลส์สี่เหลี่ยม (ก) ขนาด (ข) เฟส 252342 Chapter_2
สัญญาณและการวิเคราะห์สเปกตรัมสัญญาณและการวิเคราะห์สเปกตรัม • สัญญาณพัลส์สี่เหลี่ยมที่สร้างจากอนุกรมฟูเรียร์ • (ก) ผลรวมสามเทอม (ข) ผลรวมถึงเทอมที่ 7 252342 Chapter_2
สัญญาณและการวิเคราะห์สเปกตรัมสัญญาณและการวิเคราะห์สเปกตรัม • พัลส์สี่เหลี่ยมความกว้าง สูง A • สเปกตรัมต่อเนื่องของพัลส์สี่เหลี่ยมV(f) = A sinc(f) 252342 Chapter_2
ระบบเชิงเส้น • ระบบเชิงเส้นและการวิเคราะห์สัญญาณ • การวิเคราะห์ระบบเชิงเส้นในเชิงเวลา • ผลตอบสนองอิมพัลส์ (Impulse response) :h(t) • การวิเคราะห์ระบบเชิงเส้นในเชิงความถี่ • ฟังก์ชันการถ่ายโอน (Transfer function) :H(f) ระบบ สัญญาณขาออก y(t) สัญญาณขาเข้า x(t) 252342 Chapter_2
ระบบเชิงเส้น • ความสัมพันธ์ระหว่างค่าเข้ากับค่าออกในเชิงเวลาและความถี่ • X(f)=F{x(t)} • Y(f)=F{y(t)} ระบบ h(t) H(f) สัญญาณขาออก y(t)=h*x(t) Y(f)=H(f)X(f) สัญญาณขาเข้า x(t) X(f) 252342 Chapter_2
ระบบเชิงเส้น • การผิดเพี้ยนของสัญญาณจากการส่งผ่านระบบเชิงเส้น • การผิดเพี้ยนเชิงขนาด(Amplitude distortion) เกิดขึ้นจากการตอบสนองต่อสัญญาณแต่ละความถี่ไม่เท่ากัน |H(f)| |K| • การผิดเพี้ยนเชิงเวลาหน่วงเกิดจาก(Delay distortion) Distortion 252342 Chapter_2
Equalizer Channel Hc(f) Heq(f) y(t) x(t) ระบบเชิงเส้น • ช่องสัญญาณในระบบสื่อสารถูกพิจารณาว่าเป็นระบบเชิงเส้น • สัญญาณเมื่อผ่านช่องสัญญาณจึงอาจเกิดการผิดเพี้ยนได้ • การแก้ไข วิธีการหนึ่งคือใช้วงจรอีควอไลเซอร์ (Equalizer) 252342 Chapter_2
ระบบเชิงเส้น • ระบบเชิงเส้นที่มีความสำคัญในระบบสื่อสารคือ • วงจรกรอง (Filter) • Low-pass Filter • High-pass Filter • Band pass Filter • Band reject Filter • Notch Filter 252342 Chapter_2
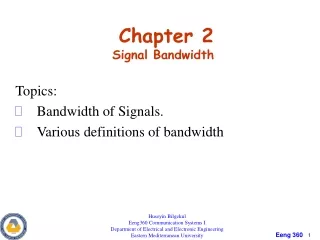
นิยาม • สเปกตรัม (Spectrum) = ช่วงของความถี่ [fmin, fmax] • แถบกว้างความถี่,แบนด์วิด (Bandwidth;BW) =fmax-fmin • แบนด์วิดของสัญญาณ :ความแตกต่างระหว่างองค์ประกอบความถี่สูงสุดและความถี่ต่ำสุดที่มีในสัญญาณนั้น • แบนด์วิดของช่องสัญญาณ :ความแตกต่างระหว่างความถี่สูงสุดและความถี่ต่ำสุดที่สามารถผ่านช่องสัญญาณนั้นได้ • ตัวอย่าง • สัญญาณ A มี Spectrum [100,120], Bandwidth=120-100=20 [Hz], สัญญาณ B มี Spectrum [20,40],Bandwidth=40-20=20 [Hz] • Effective bandwidth = แถบความถี่ที่มีพลังงานส่วนใหญ่ของสัญญาณ • Half-power Bandwidth (3dB-Bandwidth) • แถบกว้างความถี่ของระบบจากความถี่ที่ตอบสนองสัญญาณสูงสุดถึงความถี่ที่กำลังลดลงครึ่งหนึ่ง • หรือจากความถี่ที่ขนาดสูงสุดถึงความถี่ที่ขนาดลดลงเหลือ 0.707 เท่า • Baseband= แถบความถี่ของสัญญาณที่มีสเปกตรัมความถี่ต่ำรอบๆ ความถี่ศูนย์ 252342 Chapter_2
นิยาม • หน่วยเดซิเบล(Decibel)= 10log(อัตราส่วนกำลัง) • Power Gain • กำลังเทียบกับ 1 W 0 dBW = 1W • กำลังเทียบกับ 1mW 0 dBm = 1 mW • Voltage Gain (Ro=Ri) • แรงดันเทียบกับ 1 V 0 dBV =1 V • แรงดันเทียบกับ 1 mV 0 dBmV = 1 mV 252342 Chapter_2
คอร์รีเลชันของสัญญาณและความหนาแน่นสเปกตรัมคอร์รีเลชันของสัญญาณและความหนาแน่นสเปกตรัม • คอร์รีเลชันของสัญญาณที่มีกำลังจำกัด • คอร์รีเลชันของสัญญาณที่มีพลังงานจำกัด • ความสัมพันธ์ระหว่างออโตคอร์รีเลชันกับความหนาแน่นสเปกตรัม 252342 Chapter_2
สัญญาณแรนดัมและสัญญาณรบกวนสัญญาณแรนดัมและสัญญาณรบกวน • กระบวนการแรนดัม (Random processes) • กรณีกระบวนการแบบ ergodicจะได้ 1. ค่าเฉลี่ย หรือ mean, E[V] จะเท่ากับระดับ DC ของสัญญาณ 2. กำลังสองของค่าเฉลี่ย,(E[V])2เท่ากับกำลังขององค์ประกอบ DC ตกคร่อมตัวต้านทาน 1 โอห์ม 3. ค่ากำลังสองเฉลี่ย E[V2] = กำลังเฉลี่ยทั้งหมดของสัญญาณ v(t) ตกคร่อมตัวต้านทาน 1 โอห์ม 4. รากที่สองของค่ากำลังสองเฉลี่ยคือค่า rms 5. ค่าแวเรียนซ์ = กำลังเฉลี่ยในส่วนที่แปรตามเวลา (AC component) ตกคร่อมตัวต้านทาน 1 โอห์ม 6. ค่าเบี่ยงเบนมาตรฐาน เป็นค่า rmsของ AC component ของสัญญาณ 7. ถ้า E[V]=0 , เป็นค่า rmsของสัญญาณ 252342 Chapter_2
สัญญาณรบกวน (Noise) • สัญญาณรบกวนขาว (White noise) • ความหนาแน่นสเปกตรัมคงที่ทุกความถี่ (มีองค์ประกอบความถี่ทุกความถี่ • กำลังของสัญญาณรบกวน ขึ้นกับแบนด์วิดของระบบ • ค่ากำลังสองเฉลี่ยของสัญญาณรบกวน ขึ้นอยู่กับความต้านทานของระบบ 252342 Chapter_2
สัญญาณรบกวน (Noise) • สัญญาณรบกวนความร้อน (Thermal Noise) • ความร้อนในตัวอุปกรณ์ก่อให้เกิดสัญญาณรบกวน • วงจรสมมูลของตัวต้านทานที่มีสัญญาณรบกวน เสมือนว่ามีแหล่งกำเนิด 252342 Chapter_2
สัญญาณรบกวน (Noise) • การส่งผ่านสัญญาณในระบบที่มีสัญญาณรบกวน การส่งผ่านสัญญาณรบกวนความร้อนผ่านระบบเชิงเส้น (ก) แบบจำลองของระบบ (ข) แบบจำลองสมมูลเมื่อรวมสัญญาณรบกวน 252342 Chapter_2
สัญญาณรบกวน (Noise) • แบนด์วิดสมมูลของสัญญาณรบกวน (Equivalent noise bandwidth) 252342 Chapter_2
สัญญาณรบกวน (Noise) • อุณหภูมิสัญญาณรบกวน (Noise temperature) • Te :Equivalent Noise Temperature • Signal-to-Noise Ratio : SNR • อัตราส่วนกำลังของสัญญาณต่อกำลังของสัญญาณรบกวน • บอกคุณภาพของสัญญาณว่ามีสัญญาณรบกวนปนอยู่เท่าไร • น้อยส์แฟคเตอร์ (Noise factor),น้อยส์ฟิกเกอร์ (Noise figure) • นิยามเป็นอัตราส่วน SNR ขาเข้าต่อ SNR ขาออก • บอกคุณภาพของระบบว่าเพิ่มสัญญาณรบกวนให้แก่สัญญาณที่ผ่านระบบ 252342 Chapter_2
สัญญาณรบกวน (Noise) • น้อยส์แฟคเตอร์ (Noise factor :F) • น้อยส์ฟิกเกอร์ (Noise figure :NF) • น้อยส์แฟคเตอร์ในหน่วย dB 252342 Chapter_2
สัญญาณรบกวน (Noise) • กรณีที่ระบบต่อเรียง (Cascade) หาค่าน้อยส์แฟคเตอร์รวม • F เป็นค่าน้อยส์แฟคเตอร์รวม • F1,F2,F3,F4… เป็นค่าน้อยส์แฟคเตอร์ของระบบที่ 1, 2, 3, 4… ตามลำดับ • ถ้าบอกค่าน้อยส์ฟิกเกอร์ในหน่วย dB ต้องแปลงเป็นน้อยส์แฟคเตอร์หน่วยจำนวนเท่าก่อน • กรณีของระบบที่มีการลดทอนเช่นสายนำสัญญาณ น้อยส์แฟคเตอร์จะเท่ากับอัตราขยายของระบบ • G1,G2,G3,G4… เป็นอัตราขยายของระบบที่ 1, 2, 3, 4… ตามลำดับ • ถ้าระบบที่มีการลดทอนอัตราขยายเท่ากับ 1/G 252342 Chapter_2
สัญญาณรบกวน (Noise) • ตัวอย่าง ระบบขยายสัญญาณหนึ่งประกอบด้วยเครื่องขยายต่อเรียงกัน 3 ตัว โดยวงจรขยายแต่ละตัวมีอัตราขยายและน้อยส์ฟิกเกอร์ ดังนี้ ABC • อัตราขยาย (dB)10 15 20 • น้อยส์ฟิกเกอร์(dB)5 4 3 สมมุติให้อิมพีแดนซ์ขาเข้าและขาออกของเครื่องขยายแต่ละตัวเท่ากัน จงหาค่าน้อยฟิกเกอร์รวมของระบบ ก. เมื่อนำเครื่องขยายมาต่อเรียงกัน(Cascade) ตามลำดับ A B C ข. เมื่อนำเครื่องขยายมาต่อเรียงกัน(Cascade) ตามลำดับ C B A 252342 Chapter_2
สัญญาณรบกวน (Noise) • วิธีทำ กำหนดสัญลักษณ์ แปลงค่าอัตราขยายเป็นจำนวนเท่า และเปลี่ยนน้อยส์ฟิกเกอร์เป็นน้อยส์แฟคเตอร์ (หน่วยจำนวนเท่า) A B C • อัตราขยาย (จำนวนเท่า)GA =10 GB=31.623 GC=100 • น้อยส์แฟคเตอร์(จำนวนเท่า)FA=3.1623 FB=2.5119 FC=1.9953 252342 Chapter_2
สัญญาณรบกวน (Noise) ก. น้อยส์แฟกเตอร์รวมของระบบ น้อยฟิกเกอร์รวมของระบบNF=5.207 dB B C A 252342 Chapter_2
สัญญาณรบกวน (Noise) ข. น้อยแฟกเตอร์รวมของระบบ น้อยฟิกเกอร์รวมของระบบNF=3.034 dB B A C 252342 Chapter_2
สัญญาณรบกวน (Noise) • QUIZ ระบบสื่อสารหนึ่งต้องการส่งสัญญาณขนาด 70 dBuVจากต้นทางไปยังปลายทางด้วยระยะทาง 50 เมตร ด้วยสายนำสัญญาณที่มีอัตราการลดทอน 20 dB/100m โดยเครื่องรับปลายทางมีน้อยฟิกเกอร์15 dB • หาขนาดสัญญาณปลายทางและน้อยฟิกเกอร์รวมของระบบ • ต่อเครื่องขยายที่มีอัตราขยาย 30 dB น้อยฟิกเกอร์8dB ก่อนเข้าเครื่องรับ หาขนาดสัญญาณปลายทางและน้อยฟิกเกอร์รวมของระบบ • ต่อเครื่องขยายที่มีอัตราขยาย 30 dB น้อยฟิกเกอร์8dB ที่ต้นทาง หาขนาดสัญญาณปลายทางและน้อยฟิกเกอร์รวมของระบบ สมมุติให้อิมพีแดนซ์ขาเข้าและขาออกของเครื่องขยายเท่ากับสายนำสัญญาณและเครื่องรับ 252342 Chapter_2