Download
1 / 5
50 likes | 117 Views
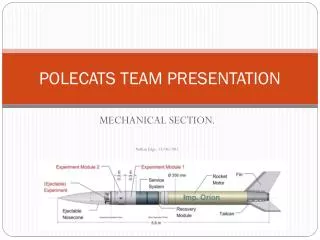
Electronics Team Presentation. Work to date; Come up to speed on REXUS/CATS principles (!) Identify controller options Define Power Supply requirements (AFAP) Identify Power Supply options Consider secondary sensors Consider next steps. Controller Options. Microcontroller (PIC, Arduino)

E N D
Electronics Team Presentation • Work to date; • Come up to speed on REXUS/CATS principles (!) • Identify controller options • Define Power Supply requirements (AFAP) • Identify Power Supply options • Consider secondary sensors • Consider next steps
Controller Options • Microcontroller (PIC, Arduino) • Low cost, simple, low power • Limited Hardware configuration • FPGA • Flexible, truly parallel, low cost • Complex support circuitry, difficult packages • SBC (PC-104, Gumstix, IGEP) • Very powerful, hardware easy to interface • High cost, high power, complexity, “overheads”
Power Supply • Broadly two PSU types needed • Low voltage for controller/signal conditioning • High voltage for CATS/detector • Low voltage “easy”; • COTS ICs with support components • Few £ (plus PWB costs?) • Linear vs Switch-mode • High voltage less “easy”; • COTS modules available for few £100s • Self build cheaper but “worse”
Secondary Sensors • To give an “instant” return from the payload and support CATS • Preferably low “overhead” sensors, ie; • Temperature • Pressure • Inertial measurements • System Voltages • ???? • Probably directly interfaced to controller
Next steps • Define poleCATS budget/funding model • Governs all component choices • Select controller type • Will require science input- data processing needs • Define data to be downlinked/stored • Select detector • Will define HV needs • Select secondary sensors • Consider on/off periods during countdown • Answer Proposal Form questions!!