Download
1 / 48
580 likes | 1.66k Views
平成14年度 北関東地区国立学校教室系技術職員合同研修 (電気・電子コース). 日常生活の中の制御工学. 2002年9月5日. 宇都宮大学 工学部 電気電子工学科 足立 修一. adachis@cc.utsunomiya-u.ac.jp. 「制御」( Control) から連想するもの. 自動車,航空機,ロケット,人工衛星,... 原子力:制御棒 コンピュータ制御,電子制御 ロボット スポーツ コントロールのよい投手 中田のボールコントロールはすばらしい 日常生活 自転車の運転,自動車の運転(アクセル,ブレーキ,...)

E N D
平成14年度 北関東地区国立学校教室系技術職員合同研修 (電気・電子コース) 日常生活の中の制御工学 2002年9月5日 宇都宮大学 工学部 電気電子工学科 足立 修一 adachis@cc.utsunomiya-u.ac.jp
「制御」(Control)から連想するもの • 自動車,航空機,ロケット,人工衛星,... • 原子力:制御棒 • コンピュータ制御,電子制御 • ロボット • スポーツ • コントロールのよい投手 • 中田のボールコントロールはすばらしい • 日常生活 • 自転車の運転,自動車の運転(アクセル,ブレーキ,...) • バケツに水を入れる • エアコン • その他 • マインドコントロール
制御とは? 注目している対象物に属する注目している動作が, なんらかの目標とする動作になるように, その対象物に操作を加える行為(働き)のこと 大須賀,足立著:システム制御へのアプローチ,コロナ社 (1999) 2,400円 足立著:MATLABによる制御工学,東京電機大学出版局 (1999) 3,100円
講義内容 • 日常生活の中の制御 • 足立研究室の研究テーマ 制御理論の産業応用の事例 • 大型人工衛星 • アクティブノイズコントロール • 半導体露光装置のアクティブ振動制御 • 大型無人ヘリコプターの姿勢・位置制御 • システム同定とは
日常生活の中の制御 • 家電製品(マイコン制御の入っていない家電製品はほとんどない) • CD, DVDプレーヤ :ヘッドの位置決め,トラッキング,サーボ系 • エアコン,炊飯器,洗濯機 • 自動車(機械から電気(あるいはハイブリッド)へ) • パワープラント制御(エンジン制御,自動変速機制御): 燃料噴射制御(空燃比制御),排気ガス問題 ← 環境問題 • 制動力,駆動力制御: ABS (anti-lock brake system) • 車両制御: 4WS (4 wheel steering system) • ハイブリッドカー,電気自動車 • ITS (Intelligent Transportation System) • 鉄道 • アクティブサスペンション
先端技術の中の制御 • 超高速貨物船 テクノスーパーライナー:1000トンクラスの貨物を 時速50ノット(約90km/h)で • 製鉄所 圧延装置 • 宇宙機 • ロケット:姿勢制御 • 人工衛星:姿勢制御,位置制御 • 知能ロボット • ASIMO (HONDA) • AIBO (SONY)
システム制御工学 制御が関わる分野や対象は限定されたものでない。 何らかの意味で「動き」があるものにはすべて関連している。 システム制御工学は横断的な,概念指向的な学問である。 • 制御工学という授業科目は,いろいろな学科で講義されている: • 電気,機械,情報,応用化学,数理,... • 総合科学技術会議への提言: • 「横断型研究開発を推進するための基盤整備の重要性」 • 計測自動制御学会,システム制御情報学会,精密工学会,日本ロボット学会, • 日本ファジィ学会,ヒューマンインタフェース学会,日本バーチャルリアリティ学会, • 人工知能学会,スケジューリング学会,日本植物工場学会, • 日本オペレーションズ・リサーチ学会,日本リモートセンシング学会
講義内容 • 日常生活の中の制御 • 足立研究室の研究テーマ 制御理論の産業応用の事例 • 大型人工衛星 • アクティブノイズコントロール • 半導体露光装置のアクティブ振動制御 • 大型無人ヘリコプターの姿勢・位置制御 • システム同定とは
足立研究室の研究テーマ • 制御系設計のためのモデリング理論 制御系を設計するためには,対象の数学モデルが必要 • 第一原理モデリング(物理モデリング) • システム同定理論 • 制御系設計理論 • ロバスト制御 • モデル予測制御 • 制御理論,システム同定理論の産業応用 • ディジタル信号処理,適応信号処理,時系列解析 http://arx.ee.utsunomiya-u.ac.jp/
制御理論の産業応用の事例 • 大型人工衛星 “ETS-VI” 軌道上同定実験 (航空宇宙技術研究所との共同研究,’86~’96 ) • 自動車車室内騒音のアクティブ制御 (本田技術研究所との共同研究, ’92~’01 ) • 半導体露光装置のアクティブ振動制御 (キヤノンとの共同研究,’98~’00) • 大型無人ヘリコプタの自律飛行制御系設計 (川田工業との共同研究,’99~‘02) • 圧延セットアップモデルの学習 (日本鉄鋼協会,’98~’01) • 予防安全のための自動車の運転システム (本田技術研究所との共同研究, ’00~ )
大型人工衛星 “ETS-VI” 軌道上同定実験 • 航空宇宙技術研究所との共同研究 • 1994年8月,H-IIロケットにより打ち上げられた人工衛星ETS-VI(技術試験衛星VI型,重量2トン,全長30メートル) • 1994.12~1995.3 軌道上システム同定実験 • M系列ランダム加振実験 • 予測誤差法,部分空間法を適用 • デシメーション法,不確かさの同定 など,さまざまなシステム同定理論 を提案
大型人工衛星の特徴 • 分布定数系,振動系 • 多数の振動モードが存在 • 減衰係数が小 • モデルの不確かさが存在 • ノミナルモデル:(剛体)+(主要振動モード) • アンモデルドダイナミクス:高次振動モード • 地上実験の難しさ • 重力の影響で大型衛星全体の地上実験は不可能 軌道上システム同定実験の必要性
ランダム加振実験の制御システム構成 • 同定入力 : トルク(スラスタ),PRBS(M系列) • 出力 : 角変位 • 姿勢制御系 : PD+2次フィルタ • (制御系の帯域幅は非常に低い)
アクティブ ノイズ コントロール (ANC) 音をもって音を制す • 机上の理論から実際の技術へ(DSPの進化) • 対象周波数:500 Hz以下 (それ以上の帯域はパッシブ制御) • フィードフォワード制御からフィードバック制御,2自由度制御へ • ディジタル信号処理からフィードバック制御へ • 音響伝達系:むだ時間系(非最小位相系) → ウオーターベッド効果 • 音響伝達系のモデリングがポイント • ホンダアコードワゴンで実用化(2000.6)
フィードフォワードANC • もっとも一般的な ANC 構成 • 参照信号と相関のある騒音のみを消音 • 因果性の仮定のもとで比較的広帯域な消音 • 参照信号センサが必要 • → ハードウェアの複雑化 • センサ配置問題
フィードバックANC • 参照信号センサが不必要 • 不安定性の危険(ハウリング) • 消音性能に限界(非最小位相系のため)
FB-ANC の設計手順 1) 音響伝達系のモデリング • 物理モデリングとシステム同定を融合した 実用的なモデリング手順 • ロバスト制御系設計のための不確かさのモデリング 2) H∞制御によるロバストフィードバック制御系の設計 • 設計仕様の与えやすさ ⇒ 周波数重み関数による定量化 • 消音性能を事前に予測可能 3) 消音実験による制御性能の確認
一次音源スピーカ(騒音源) エラーセンサ(マイク) 騒音発生用PC スピーカアンプ サンプリング周波数 3,000Hz DSP 二次音源スピーカ 実験データ取得用PC サンプリング周波数 11,025Hz DSPホストコンピュータ 消音実験による有効性の検証
実験装置の構成 一次音源スピーカ DSP 二次音源スピーカ エラーセンサ
10dB 10dB A-weighted relative sound pressure level A-weighted relative sound pressure level 距離0.5m 距離0.2m 100 120 140 160 180 200 100 120 140 160 180 200 Frequency [Hz] Frequency [Hz] 実験結果 制御前後の音圧レベル (騒音:自動車車室内擬似ロードノイズ) 制御前 制御前 制御後 制御後 * 距離0.5mの場合も,距離0.2mと同様の手順で設計
10dB A-weighted relative sound pressure level 距離1m 100 120 140 160 180 200 Frequency [Hz] 実験結果(cont’d) 制御前後の音圧レベル (騒音:自動車車室内擬似ロードノイズ) 制御前 最大消音量の比較 制御後
アクティブダンパ (回路図) (基板) 半導体露光装置のアクティブ振動制御 • 除振装置のモデリング:部分空間法による多変数系同定 • アクティブ除振制御系設計:独立モード制御
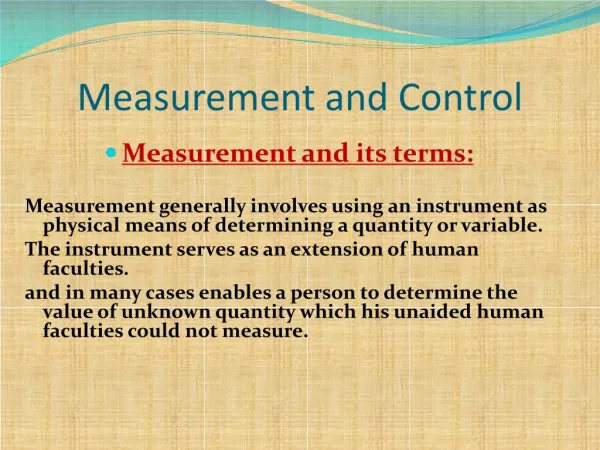
Micro-moving Stage XY Stage Base plate CH3 Anti-vibration units CH2 CH1 半導体露光装置のモデリング • ナノメータオーダの露光精度 • 装置に伝播する外乱振動の除去 アクティブ振動制御 • 従来のモデリング法 • 機構の設計値に基づく物理モデルの構築 (物理モデリング) 機構の設計値はどの程度信じられるのか? • 正弦波掃引法による周波数特性の測定 (サーボアナライザ) 長時間の測定(特に,多軸の同定実験では)
システム同定に基づくモデリング法 • 半導体露光装置の物理的な事前情報を考慮したシステム同定法 • 部分空間法を適用することにより,多自由度同定実験が可能 • 短時間の測定で同定可能 (従来のサーボアナライザ:12時間, 提案法:40秒)
20 20 20 12th 0 0 0 Gain [dB] Gain [dB] Gain [dB] 24th -20 -20 -20 sine sweep -40 -40 -40 1 10 1 10 1 10 Frequency [Hz] Frequency [Hz] Frequency [Hz] 20 20 20 0 0 0 Gain [dB] Gain [dB] Gain [dB] -20 -20 -20 -40 -40 -40 1 10 1 10 1 10 Frequency [Hz] Frequency [Hz] Frequency [Hz] システム同定結果(対角要素) (b) Y/Y (c) Z/Z (a) X/X
大型無人ヘリコプタの姿勢・位置制御 • 無人ヘリコプタへの期待 農薬散布、山火事の消防活動 災害現場写真撮影など • 自律飛行制御系の必要性
飛行システム構成図 機上移動局 その他の センサ群 無線機 DSP GPS受信機 遠隔操縦者 地上基地局 • 飛行コマンド指令 • 運航状況のモニタ • GPS情報のアップリンク 地上 GPS 局 無線機 コンピュータ • 操作信号(修正舵) • エンジン停止信号
講義内容 • 日常生活の中の制御 • 足立研究室の研究テーマ 制御理論の産業応用の事例 • 大型人工衛星 • アクティブノイズコントロール • 半導体露光装置のアクティブ振動制御 • 大型無人ヘリコプターの姿勢・位置制御 • システム同定とは
システム同定(System Identification) Identification:同一であることの証明,身分証明 Ex.) IDカード • パスポート:国籍,名前,有効期限,... • オリンピックなどでのプレス:NHK,TBS,... • 工事現場:血液型,緊急連絡先,..., 足立著:MATLABによる制御のためのシステム同定, 東京電機大学出版局, (1999)
システム同定とは? 対象の入出力データから, ある目的のもとで, 対象と同一であることを証明できるような 数学モデルを構築すること
システム同定とは? (cont’d) • 目的:何のためにモデルを構築するのか • 制御系設計 • 故障診断,異常検出 • 数学モデル:どのようなモデルを構築したいのか • 外部記述:伝達関数,周波数伝達関数 • 内部記述:状態空間表現 • 同一である:モデルの品質 • 統計的な評価関数 • モデルの妥当性 • 公称モデルとモデルの不確かさ
スイカのシステム同定 耳 (センサ) 手 (アクチュエータ) 音 (応答) インパルス (刺激) 脳 (システム同定) スイカのモデル
制御のためのモデリング • 対象とするシステムと同じ複雑さをもつモデルを構築することが,制御のためのモデリングの目的ではない! • ポイントを抑えた簡単なモデルを構築することが望まれる。 • 対象の主要なダイナミクスをできるだけ簡単なモデルで表現したい。
システム同定と線形制御系設計 1. 古典制御の時代 (~1960) 古典制御(周波数領域) • 図的設計法(PID制御) • 試行錯誤(ループ整形) ノンパラメトリックモデル • 周波数応答(ボード線図) • インパルス応答 • ステップ応答
システム同定と線形制御系設計 2. 現代制御の時代 (1960 ~ 80) 現代制御(時間領域) • 状態空間法(最適レギュレータ) • 代数的方法(多項式分解表現) パラメトリックモデル • 状態空間モデル(A, B, C, D) • 入出力モデル(微分方程式,差分方程式)
システム同定と線形制御系設計 3. ポスト現代制御の時代 (1980 ~) ロバスト制御(時間+周波数領域) H∞最適制御 • 設計仕様:周波数領域 • 制御系設計:時間領域 パラメトリック+ノンパラメトリックモデル • 公称モデル(パラメトリック) • 不確かさの評価(ノンパラメトリックモデル) W1,W2など
モデリングと制御系設計 アドバンスト制御理論の適用例 • 航空・宇宙産業(ロケット,人工衛星) • 自動車産業 • ロボット • 鉄鋼業(圧延) • パワーエレクトロニクス,... • 数学モデルが比較的構築しやすいプラント • (メカニカルシステム) • 制御性能の向上が強く望まれるプラント
モデリングの種類 • 物理モデリング White-box modeling Phenomenon-based modeling • システム同定 Black-box modeling Data-based modeling • Gray-box modeling
物理モデリング • 物理モデル,精密モデル,詳細モデル • モデリングの方法 対象を記述する物理法則,化学法則 • 物質収支 • エネルギー収支 保存則 • 運動量収支,... • 計算物理 計算量の増大,スーパーコンピュータ
物理モデリング(cont’d) • 目的:解析,シミュレーション • 予測:線形ではないので,周波数を利用できず, 頼れるものは時間応答のみ • 実時間シミュレータ • 非定常状態,異常事態に対応 • ポイント • 非線形 • 非定常 • 分布定数 大規模・複雑系
システム同定 • モデル インパルス応答,伝達関数,周波数伝達関数 状態方程式 • システム同定法 • 相関法,スペクトル解析法 • 最小二乗法,予測誤差法,補助変数法 • 部分空間法
モデルとロバスト制御 実システム モデリングされない ダイナミクス 物理モデル 制御モデル モデルの不確かさ evaluation ロバスト制御
実システム 物理モデル 制御モデル モデルとロバスト制御 (cont’d) • どれだけ物理モデル(詳細モデル)を実システムに近づけられるか? • 制御モデル(公称モデル)が詳細モデルの重要な部分をよく近似しているか? • 近似しきれなかった部分を評価できるか? (モデルの不確かさの評価)