Download
1 / 43
500 likes | 870 Views
Parciální derivace. Derivace pro funkce jedné proměnné máme zavedeny dobře. Jak ale přistupovat k funkcím více proměnných? Dá se k prostorovému oboru hodnot vyrobit tečna?.

E N D
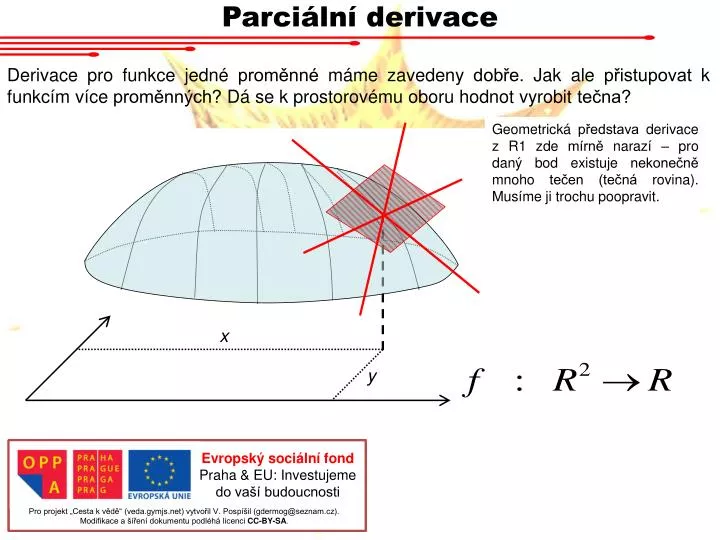
Parciální derivace Derivace pro funkce jedné proměnné máme zavedeny dobře. Jak ale přistupovat k funkcím více proměnných? Dá se k prostorovému oboru hodnot vyrobit tečna? Geometrická představa derivace z R1 zde mírně narazí – pro daný bod existuje nekonečně mnoho tečen (tečná rovina). Musíme ji trochu poopravit. x y Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti Pro projekt „Cesta k vědě“ (veda.gymjs.net) vytvořil V. Pospíšil (gdermog@seznam.cz). Modifikace a šíření dokumentu podléhá licenci CC-BY-SA.
Parciální derivace Derivace pro funkce jedné proměnné máme zavedeny dobře. Jak ale přistupovat k funkcím více proměnných? Dá se k prostorovému oboru hodnot vyrobit tečna? Geometrická představa derivace z R1 zde mírně narazí – pro daný bod existuje nekonečně mnoho tečen (tečná rovina). Musíme ji trochu poopravit. Proložíme funkci rovinou rovnoběžnou s osou x. Průnik roviny a funkce utvoří rovinnou křivku – graf funkce fy : R -> R. V zápisu funkce se sice i nadále bude vyskytovat y, ale pouze jako konstantní parametr. Nyní lze snadno utvořit tečnu rovnoběžnou s osou x, resp. der-ivaci podle x. x y
Parciální derivace Derivace pro funkce jedné proměnné máme zavedeny dobře. Jak ale přistupovat k funkcím více proměnných? Dá se k prostorovému oboru hodnot vyrobit tečna? Geometrická představa derivace z R1 zde mírně narazí – pro daný bod existuje nekonečně mnoho tečen (tečná rovina). Musíme ji trochu poopravit. Stejně to můžeme udělat v kolmém směru: x y
Parciální derivace Derivace pro funkce jedné proměnné máme zavedeny dobře. Jak ale přistupovat k funkcím více proměnných? Dá se k prostorovému oboru hodnot vyrobit tečna? Tyto dvě přímky nám opravdu vytyčují rovinu. Co z toho ale můžeme nazvat „derivací“ ? Jednu z přímek, nebo výslednou rovinu? x y
Parciální derivace Buď f reálná funkce více proměnných . Pro tuto funkci definujeme parciální (částečné) derivace podle jednotlivých proměnných jako Definice 76. Obdobně lze definovat parciální derivace pro funkci obecně n proměnných Je zřejmé, že tyto definice jsou ekvivalentní s dříve použitými derivacemi :
Parciální derivace Zde je vše kromě e-x konstanta. Druhý člen tedy úplně zmizí (derivace konstanty je nula), y se nemění (násobení funkce konstantou). Zde e-x se chová jako konstanta, která násobí y. První člen tedy derivujeme jako polynom prvního řádu – y zmizí. V druhém členy se sin y změní na cos y, z je konstantní a nemění se. Příklad V prvním členu se z nevyskytuje – celý výraz derivujeme jako konstantu a mizí. Druhý člen je v z polynomem prvního stupně a zůstane z něj jen násobící konstanta – tedy sin y. Matematická definice je sice výstižná, přeci jen je třeba zdůraznit, že parciální derivování se provádí pouze v jedné zvolené proměnné a ostatní proměnné se chovají jako konstanty. Tedy například : Spočítejte parciální derivace funkce
Parciální derivace vyšších řádů Funkce můžeme derivovat opakovaně podle stejných či různých proměnných. Druhé parciální derivace jsou definovány jako: Stejně tak jsou definovány parciální derivace smíšené: Pořadí výrazů v čitateli je důležité, určuje pořadí derivací! Nicméně prohodíme-li pořadí parciálních derivací, dostaneme stejné výsledky, je-li původní funkce f dostatečně „mravně se chovající“.
Parciální derivace Věta 41. Příklad Záměnnost smíšených derivací : jsou-li smíšené derivace v bodě [x0, y0] spojité, pak jsou si zde rovny. Spočítejte smíšené druhé parciální derivace funkce symetrie vůči záměně proměnných
Parciální derivace Příklad Příklad DÚ Příklad Spočítejte smíšené druhé parciální derivace funkce Spočítejte smíšené druhé parciální derivace funkce Spočítejte smíšené druhé parciální derivace funkce Spočítejte smíšené druhé parciální derivace funkce
Totální diferenciál Připomeňme si zavedení diferenciálu pro funkci jedné reálné proměnné: Diferenciál funkce f(x)=x (df)(ξ) = x’ξ = 1.ξ = ξ Obecně: lineární zobrazení f’(x) dx Diferenciál je zjednodušeně řečeno nahrazení dané funkce f přímkou ve zkoumaném bodě. Ve všech infini-tezimálních vztazích pak pracujeme s df a dx místo f a x. Pro zobrazení f : R -> R neměl pojem diferenciálu příliš valný význam. Ovšem pro analýzu ve více rozměrech je důležitý.
Totální diferenciál Ve více rozměrech fungují jednotlivé diferenciály stejně pro každou proměnnou zvlášť : Po krátkém zamyšlení zjistíme, že diferenciály dx, dy, dz (v R3) jsou totožné se souřadnicovými fun-kcionály z lineární algebry – vektorový prostor je zde definiční obor. x y f : R2 -> R Na základě algebry pak snadno můžeme definovat totální dife-renciál funkce f jako lineární zobrazení z definičního oboru do oboru hodnot.
Totální diferenciál Totální diferenciál je tedy lineární zobrazení, které plní obdobnou funkci jako tečna v jednorozměrném případu funkce f : R -> R. Funkci, která má totální diferenciál říkáme diferencovatelná. Existují funkce, které totální diferenciál nemají (jejich parciální derivace nejsou spojité), těmi se ale nebudeme zabývat, neboť obvykle nemají fyzikální význam. Druhý totální diferenciál zavádíme pomocí druhých derivací takto (příklad pro R2) : Záměna smíšených derivací
Totální diferenciál Aparát totálního diferenciálu nabývá na významu například v termodynamice. Termodynamické potenciály jsou diferencovatelné a jejich přírůstky jsou totální diferenciály, například pro vnitřní energii plynu platí tj. vnitřní energie je v tomto případě funkcí entropie a objemu a dá se ukázat, že Vnitřní energii můžeme popsat i pomocí jiných proměnných a diferenciály pak mezi sebou volně přechází.
Derivace ve směru Dejme tomu, že jednotkový vektor udává směr v definič-ním oboru, ve kterém chceme derivovat. Potom derivaci ve směru lze definovat jako Funkce zde jako argument má vektor z definičního oboru : . Výraz v argu-mentu funkce je pak vyjádřením přímky procházející bodem a směrem . Derivace podle os x a y jsme si přiblížili za pomocí řezu rovinou rovnoběžnou s osou x resp. y. Brání nám ale něco natočit si rovinu i jinak? x y Dle této definice jsou pak parciální derivace podle jednotlivých proměnných vlastně derivace ve směru bazických vektorů:
Derivace ve směru Věta 42. Vektor parciálních derivací funkce f nazýváme gradient: Buď f zobrazení f : Rn -> R, spojité v okolí bodu a, buďte vektory z Df. Potom 1) Pro libovolné reálné c platí 2) Platí 3)
Gradient Kromě os (x,y,…) existuje v definičním oboru funkce i další význačný směr – směr nejvyššího přírůstku funkce. Tento směr je intuitivně dobře pochopitelný – stojíte-li ve svahu, pak směr největšího přírůstku je ten, ve kterém je od vás svah nejpříkřejší. Tento směr je určen gradientem. V bodě [x,y] funkce nejvíce roste Směr, ve kterém funkce roste nejvíce, je gradient x Tvrzení plyne ihned z bodu 3 předchozí věty: y což je standardní pravidlo pro výpočet skalárního součinu vektorů. Toto číslo je ale největší, pokud cos φ je maximální – a to je pro φ = 0, tedy u a grad f splývající.
Derivace ve směru a gradient Příklad Spočítejte derivaci funkce ve směru v bodě [1,2] Nejprve spočítáme gradient :
Gradient Úplný diferenciál pak můžeme vyjádřit jako formální skalární součin gradientu funkce a vektoru Gradient se zapisuje nejčastěji pomocí operátoru nabla: Tento operátor lze pak funkcí formálně vynásobit zprava:
Vektorová pole Analýzu lze rozšířit i na vektorová pole, tedy zobrazení A : Rn -> Rn. Zobrazení každému bodu v prostoru přiřazuje nějaký význačný směr (vektor). Vektorové pole například vznikne, když každému bodu v korytě řeky přiřadíte vektor rychlosti, který v něm má částice vody, když jím prochází. Vektorové pole popisuje rovněž intenzity gravitačních či elektrických polí.
Vektorová pole Parciální derivace vektorového pole zavedeme obdobně jako u skalární funkce : tj. pro každou proměnnou a pro každou složku zvlášť. Jedná se vlastně o ekvivalent tří funkcí Ax : R3 -> R, Ax : R3 -> R, Ax : R3 -> R . Speciální případ vektorového pole je tzv. potenciální pole, kde parciální derivace pro Ax, Ay, Az vedou na smíšené derivace funkce f. Toto je případ rozumných fyzikálních polí (centrální gravitační či elektrické).
Divergence vektorového pole Divergence je způsob popisu „zdrojů“ v poli. Pole na obrázku má jeden určitý bod, ze kterého se vektory „rozbíhají“. Zde je jakýsi zdroj vektorů – pole je zde má nenulovou divergenci. V popisu vodního toku je bod s nenulovou divergencí „ústí hadice“ – voda se zde objevuje. Na dalším obrázku jsou příklady polí s dvěmi „zdrojovými“ body.
Divergence vektorového pole Matematicky je divergence definována následovně: Přepíšeme-li si tento formální zápis, získáme Divergence je číslo, které má nenulovou hodnotu pouze ve zdroji a jeho velikost je úměrná „množství vytékajících vektorů“ v tomto bodě.
Rotace vektorového pole V poli zobrazeném vlevo se vektory „motají v kruzích“ kolem společného středu. V tomto bodě má pole nenulovou rotaci. V popisu vodního toku by bod s nenulovou rotací byl středem víru. Pole napravo je složitější. Vektory „krouží“ kolem bodů, které leží na kružnici procházející středem pomyslného toroidu. Pole má nenulovou rotaci na celé této kružnici.
Rotace vektorového pole Matematicky je rotace definována následovně: Oproti divergenci je zde vektorový součin (nikoliv skalární). Po rozepsání dostane-me Rotace je tedy vektor kolmý na směr „motání se“ vektorů a jeho velikost je úměrná velikosti tohoto „vektorového tanečku“.
Derivace složených funkcí Derivovat složené funkce více proměnných lze relativně snadno. Musíme si pouze uvědomit, že každá složka se parciálně derivuje jako funkce jedné proměnné. Tedy: Derivovat složené funkce více proměnných lze relativně snadno. Musíme si pouze uvědomit, že každá složka se parciálně derivuje jako funkce jedné proměnné. Tedy: Derivace vnější funkce - vnější funkci derivujeme podle vlastních proměnných. Až potom je nahradíme nezměněnými vnitřními funkcemi f a g. Derivace vnitřních funkci - derivace vnějších funkcí vynásobíme derivacemi vnitřních stejně jako v případě funkce jedné reálné proměnné.
Derivace složených funkcí Příklad Zderivujte složenou funkci Funkce je zjevně složená takto : Zderivujeme vnější funkci : Zderivujeme vnitřní funkce :
Derivace složených funkcí Příklad Zderivujte funkci Funkci si převedeme na složenou : Zderivujeme vnější funkci : Zderivujeme vnitřní funkce :
Extrémy funkcí více proměnných Příklad Hledáme-li extrém funkce více proměnných na celém definičním oboru, postup je analogický jako pro funkci jedné proměnné – spočítáme všechny parciální derivace a položíme je rovny nule. Výsledek soustavy rovnic je kandidát na extrém. Například : a tedy lokální extrém leží v bodě [1,2]. Protože funkce je v obou osách parabolická a rostoucí k plus nekonečnu, jedná se o minimum, f(1,2)= 1+4-2-8+1 = -4. Najděte extrémy funkce
Extrémy funkcí více proměnných Otázkou zůstává, jak počítat extrémy vázané na nějakou podmnožinu definičního oboru. Například jak spočítat extrémy funkce na elipse Extrém na podmnožině Df (varietě) hledáme pomocí Lagrangeových multiplikátorů.
Extrémy funkcí více proměnných Věta 43. Mějme funkci n reálných proměnných a varietu popsanou m rovnicemi Kandidáty na extrémy získáme sestrojením Lagrangeovy funkce a výpočtem soustavy rovnic získáme (x,y,z,…) a sadu lagrangeových multiplikátorů λ1, … λm.
Extrémy funkcí více proměnných Extrém na elipse:
Extrémy funkcí více proměnných Extrém na elipse:
Extrémy funkcí více proměnných Příklad Najděte extrémy funkce na povrchu koule
Dvojný integrál Integrál funkce dvou (a případně více) proměnných definujeme obdobně jako pro funkce jedné proměnné. Rozdělení definičního oboru viz obrázek. V každém obdélníčku definujeme vektor αij a integrální součet jako M Pokud pro všechny posloupnosti normálních (ve smyslu obvodu každého obdélníčku limitně se blížícího nule) rozdělení podmnožiny Df existuje Pak je funkce integrovatelná a píšeme
Dvojný integrál Věta 44. Příklad Fubiniova věta : Buď M uzavřený obdélník a1≤ x ≤ a2, b1 ≤ y ≤ b2 . Je-li funkce f na M spojitá a omezená, pak platí Spočítejte integrál
Dvojný integrál Příklad Integrační meze mohou záviset na ostatních proměnných. V takovém případě je důležitá správná volba pořadí integrace, aby úloha nebyla příliš komplikovaná. Spočítejte objem elipsoidu daného rovnicí Vyjádříme polovinu objemu (horní půlku, odřízlou rovinou xy) pomocí integrálu z funkce Podstava půlelipsoidu je omezena elipsou vyjádřenou jako jejíž rovnici v rovině xy (Df) dostaneme To nám dává integrační meze. x je z intervalu <-a,+a>, ale mez pro y závisí na x. Budeme řešit integrál
Dvojný integrál substituce Integrál zpracujeme Fubiniovou větou: a spočítáme nejprve vnitřní integrál: Zavedeme označení Tento výsledek dosadíme do vnějšího integrálu.
Dvojný integrál Dosadíme: A protože jsme počítali polovinu objemu, vyšel nám celý objem jako
Substituce ve dvojném integrálu Věta 45. Buď M uzavřená jednoduše souvislá1) množina (proměnné u, v) se zobrazí jednoznačně na uzavřenou jednoduše souvislou1) množinu N (proměnné x, y) prostým a „na“ zobrazením Nechť funkce f(x,y) je omezená a spojitá na oblasti N. Potom platí kde D(u,v) je Jacobiho determinant (Jacobián) transformace : 1) Pozn : pro naše účely toto znamená „v jednom kuse a bez děr“.
Dvojný integrál Příklad Zintegrujte funkci na mezikruží o poloměrech R1 = 1 a R2 = 2. Tento problém si přímo říká o polární souřadnice. Tedy naše substituce bude Jakobián vyjádříme takto: Jinými slovy, místo diferenciálů dx dy budeme po substituci psát r dr dφ, což odpovídá „fyzikálnímu“ odvození z transformací souřadnic. Funkci pak upravíme
Dvojný integrál Poslední problém je transformace mezí – ale ta je v tomto případě jasná, neboť má-li integrace probíhat přes celé mezikruží, musí být proměnné v intervalech Dosadíme tedy do integrálu: Což sedí, funkce je zjevně sudá v y a lichá v x, takže polovina z ní je pod rovinou xy a polovina nad.
Dvojný integrál Příklad Spočítejte integrál
Shrnutí • Parciální derivace • Totální diferenciál • Derivace ve směru • Gradient • Vektorové pole, divergence, rotace • Parciální derivace složených funkcí • Extrémy funkcí více proměnných • Vázané extrémy funkcí více proměnných • Dvojný integrál • Fubiniova věta • Substituce ve dvojném integrálu