Download

1 / 44
450 likes | 731 Views
B-spline curve approximation. zhu ping. 08.02.20. 1. Application 2. Some works 3. Discussion. Outline. Arctile:. The NURBS Book. Les Pigel&Wayne Tiller, 2nd 1996 Knot Placement for B-Spline Curve Approximation. Anshuman Razdan, Technical Report 1999

E N D
B-spline curve approximation zhu ping 08.02.20
1. Application 2. Some works 3. Discussion Outline
Arctile: • The NURBS Book. Les Pigel&Wayne Tiller, 2nd 1996 • Knot Placement for B-Spline Curve Approximation. • Anshuman Razdan, Technical Report 1999 • 3. Surface approximation to scanned data. Les Piegl&Wayne Tiller, The Visual Computer 2000 • 4. Adaptive knot placement in B-spline curve approximation. Weishi Li, Shuhong Xu, Gang Zhao, Li Ping Goh, Computer-Aided Design 2005 • 5. B-spline curve fitting based on adaptive curve refinement using domiant points. Hyungjun Park, Joo-Haeng Lee, Computer-Aided Design 2007
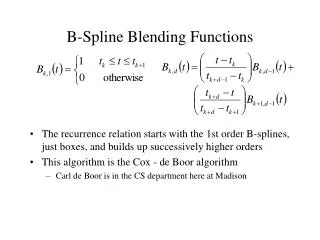
Les A.Piegl, South Florida University, research in CAD/CAM,geometric modeling,computer graphics A normal method(least square)(The Nurbs Book) Les Piegl&Wayne Tiller Wayne Tiller,in GeomWare, The NURBS Book
Given: 1. Data points; 2. End Interpolation; Goals: error bound: Process 1. Parametrization(chord parameteration) 2. Knot placement 3. Select end conditions 4. Solve the tri-diagonal linear systems of equations. A normal method(least square)(The Nurbs Book) Les Piegl&Wayne Tiller
Knot placement: 1. Start with the minimum or a small number of knots 2. Start with the maximum or many knots Error bounds: 1. 2.
Curve appromation is iterative process. Disvantage: 1. Time-consuming; 2. Relate to initial knots
Anshuman Razdan, Arizona State University Technical Report, 1999 Knot Placement for B-Spline Curve Approximation Associate Professor in the Division of Computing Studies, CAD,CAGD&CG Farin’s student
Assumption: 1. Given a parametric curve. 2. Evaluated at arbitrary discrete values within the parameter range. Goals: 1. Closely approximate with a C2 cubic B-spline curve.
Process: 1. Pick appropriate points on the given curve 2. Parametrization 3. Select end conditions 4. Solve the tri-diagonal linear systems of equations How to obtain sampling points 1. Estimate the number of sampling points; 2. Find samping points on the given curve
Estimate the number of points required to interpolate (ENP) Approximated by a finite number of circular arc segments
Finding the interpolating points(independent of parametrization): 1. arc length 2. curvature (1) curvature extrema (2)inflection point
AKSG: if , insert a auxiliary knot in the middle of the segment
Weishi Li, Shuhong Xu, Gang Zhao, Li Ping Goh Adaptive knot placement in B-spline curve approximation Computer-Aided Design 2005
a heuristic rule for knot placement Su BQ,Liu DY:<<Computational geometry—curve and surface modeling>> approximation interpolation
Algorithm: 1. smoothing of discrete curvature 2. divide the initial parameter-curvature set into several subsets 3. iteratively bisect each segment untill satisfy the heuristic rule 4. check the adjacent intervals that joint at a feature point 5. interpolate
smoothing of discrete curvature: Lowpass fliter
iteratively bisect each segment untill satisfy the heuristic rule: curvature integration Newton-Cotes formulae
B-spline curve fitting based on adaptive curve refinement using domain points Hyungjun Park, since 2001,a faculty member of Industrial Engineering at Chosun University, geometric modeling, CAD/CAM/CG application Joo-Haeng Lee, a senior researcher in ETRI CAD&CG, robotics application
Advantage: 1. compare with KTP and NKTP:when |m-n| is small, it is sensitive to parameter values.
2. compare with KRM and Razdon’s method: stability, robustness to noise and error-boundedness Proposed approach: 1. parameterization; 2. dominant point selection 3. knot placement(adaptive using the parameter values of the selected dominant points) 4. least-squares minimization
Determination of konts: are the parameter values of points
Selection of dominant points: 1. Selection of seed points from 2. Choice of a new dominant point Based on the adaptive refinement paradigm fewer dominant points at flat regions and more at complex regions
Selection of seed points: local curvature maximum(LCM) points, inflection points LCM:and exclude base curve 251 input points
Base curve with 16 control points 10 initial dominant points
Choice of a new dominant points: max deviation: The segment is to be refined. choosing shape index where
10 dominant points 13 dominant points
Experimental results Comparing:
Future: 1. parameterization 2. optimal selection of dominant points as genetic algorithm 3. B-spline surface and spatial curve