Download
1 / 24
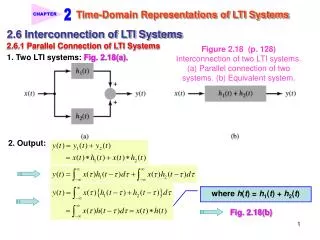
240 likes | 448 Views
Computing the output response of LTI Systems. By breaking or decomposing and representing the input signal to the LTI system into terms of a linear combination of a set of basic signals.

E N D
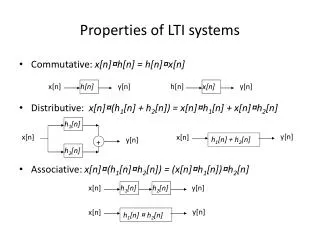
Computing the output response of LTI Systems. • By breaking or decomposing and representing the input signal to the LTI system into terms of a linear combination of a set of basic signals. • Using the superposition property of LTI system to compute the output of the system in terms of its response to these basic signals.
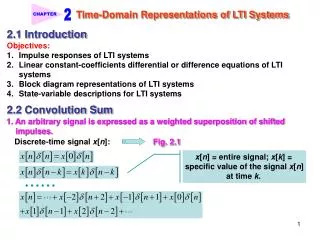
General Signal Representations By Basic Signal • The basic signal - in particular the unit impulse can be used to decompose and represent the general form of any signal. • Linear combination of delayed impulses can represent these general signals.
Response of LTI System to General Input Signal General Input Signal LTI SYSTEM Output Response Signal Delayed Impulse Signal 1 LTI SYSTEM Response to Impulse signal N LTI SYSTEM Delayed Impulse Signal N
Representation of Discrete-time Signals in Terms of Impulses. x[n] -4 -1 2 3 n -3 -2 0 1 4 Discrete-time signals are sequences of individual impulses. -1 2 3 -4 n -3 -2 0 1 4 2 3 -4 -1 n -3 -2 0 1 4
x[n] -4 -1 2 3 n -3 -2 0 1 4 -1 2 3 -4 n -3 -2 0 1 4 Discrete-time signals are sequences of individual scaled unit impulses. 2 3 -4 -1 n -3 -2 0 1 4 2 3 -4 -1 n -3 -2 0 1 4
Shifted Scaled Impulses Generally:- The arbitrary sequence is represented by a linear combination of shifted unit impulses d[n-k] , where the weights in this linear combination are x[k]. The above equation is called the sifting property of discrete-time unit impulse.
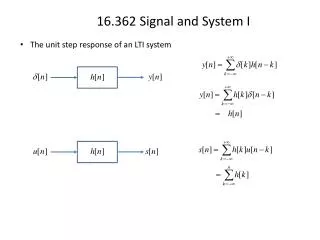
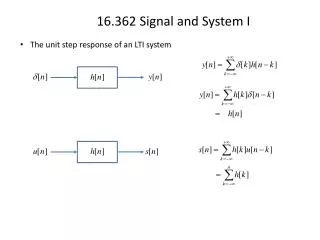
As Example consider unit step signal x[n]=u[n]:- Generally:- The unit step sequence is represented by a linear combination of shifted unit impulses d[n-k] , where the weights in this linear combination are ones from k=0 right up to k= This is identically similar to the expression we have derived in our previous lecture a few weeks back when we dealt with unit step.
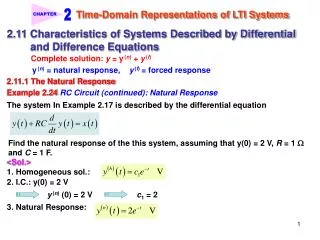
The Discrete-time Unit Impulse Responses and the Convolution Sum Representation • To determine the output response of an LTI system to an arbitrary input signal x[n], we make use of the sifting property for input signal and the superposition and time-invariant properties of LTI system.
Convolution Sum Representation • The response of a linear system to x[n] will be the superposition of the scaled responses of the system to each of these shifted impulses. • From the time-invariant property, the response of LTI system to the time-shifted unit impulses are simply time-shifted responses of one another.
Unit Impulse Response h[n] d[n] ho[n] LTI System 0 n=0 d[n-k] hk[n] LTI System k n=k
Response to scaled unit impulse input x[n]d[n-k] x[-k].d[n+k] x[-k].h-k[n] LTI System -k n=-k x[0].d[n] x[0].ho[n] LTI System 0 n=0 x[+k].d[n-k] LTI System k x[+k].hk[n] n=+k
Output y[n] of LTI System Thus, if we know the response of a linear system to the set of shifted unit impulses, we can construct the response y[n] to an arbitrary input signal x[n].
h-1[n] x[n] h0[n] 0 h1[n]
x[-1]h-1[n] x[-1]d[n+1] 0 0 x[0]h0[n] x[0]d[n] 0 0 x[1]d[n-1] x[1]h1[n] 0 0 x[n] y[n] 0 0
In general, the response hk[n] need not be related to each other for different values of k. • If the linear system is also time-invariant system, then these responses hk[n] to time shifted unit impulse are all time-shifted versions of each other. • I.e. hk[n]=h0[n-k]. • For notational convenience we drop the subscript on h0[n] =h[n]. • h[n] is defined as the unit impluse (sample) response
Convolution sum or Superposition sum. x[k] h[k]
Convolution sum or Superposition sum. x[k] h[k]
Convolution sum or Superposition sum. x[k] h[k]
Convolution sum or Superposition sum. x[k] h[k]
y[n]=x[0]h[n-0]+x[1]h[n-1]=0.5h[n]+2h[n-1] 1 1 1 h[n] x x x x 1 0.5 x[n] 0 0.5 0.5h[n] 2 2 2 2h[n-1] 2.5 2.5 y[n] 2 0.5