Download
1 / 12
130 likes | 290 Views
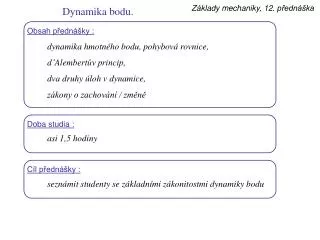
Dynamika relativného pohybu. Dynamika I, 1 3 . přednáška. Obsah přednášky :. dynamika relativního pohybu. Doba studia :. asi 1 hodina. Cíl přednášky :. seznámit studenty se způsobem řešení dynamiky relativního pohybu. v, a. a unáš. m. T. G. N. Dynamika I, 1 3 . přednáška.

E N D
Dynamika relativného pohybu Dynamika I, 13. přednáška Obsah přednášky : dynamika relativního pohybu Doba studia : asi 1 hodina Cíl přednášky : seznámit studenty se způsobem řešení dynamiky relativního pohybu
v, a aunáš m T G N Dynamika I, 13. přednáška Jednou ze zvláštních kapitol dynamiky je dynamika relativního pohybu. Představme si nákladní auto, ne jehož korbě leží náklad o hmotnosti m. Auto se rozjíždí se zrychlením aunáš (pohyb auta je unášivým pohybem). Zrychlení auta je tak velké (a tření na korbě tak malé) že náklad na korbě proklouzne směrem dozadu. Proti směru tohoto klouzavého pohybu působí třecí síla T. Pohybová rovnice nákladu je : Zrychlení nákladu je : (předpokládáme, že toto zrychlení je menší než zrychlení auta a<aunáš. Náklad se pohybuje rovnoměrně zrychleným pohybem, pro nějž platí : Toto je pohyb nákladu vůči Zemi. Dráha x je vzdálenost od nějakého pevného objektu, např. od budovy, rychlost v a zrychlení a jsou rychlost a zrychlení vůči Zemi. Jak se ale náklad pohybuje vůči vozidlu ? Např. za jakou dobu přepadne přes okraj ?
vrel, arel xrel x v, a aunáš xunáš m Dunáš T G N Dynamika I, 13. přednáška Definujme kromě dráhy x nákladu vůči Zemi ještě dráhu xunáš unášivého pohybu auta vůči Zemi a konečně xrel nákladu vůči vozu. Derivace těchto souřadnic jsou rychlost v a zrychlení a nákladu vůči Zemi, vunáš a aunáš auta vůči Zemi a konečně relativní rychlost vrel a relativní zrychlení arel nákladu vůči vozu. Pro dráhy x, resp. pro příslušné polohové vektory platí : Po dvojí derivaci dále : A konečně po vynásobení hmotností m : Rovnici můžeme přeuspořádat : Dle základní pohybové rovnice je první člen na pravé straně : Druhý člen na pravé straně můžeme nahradit d’Alembertovou silou : Pohybová rovnice relativního pohybu pak je :
Dynamika I, 13. přednáška Řešení dynamiky relativního pohybu pak můžeme shrnout takto : Unášivý pohyb nahradíme příslušnou d’Alembertovou silou a relativní pohyb řešíme jako by se jednalo o základní pohyb, přičemž do součtu sil zahrneme i tuto d’Alembertovu sílu. vrel, arel xrel x v, a aunáš xunáš m Dunáš T G N
au f f w, e r an S at f Du m G Dynamika I, 13. přednáška Postup budeme demonstrovat na úloze matematického kyvadla. Hmotný bod o hmotnost m je zavěšen na nehmotném závěsu délky r. Závěsný bod se pohybuje s konstantním zrychlením au. Poloha závěsu s hmotným bodem je dána úhlem sklonu f od svislice. Na hmotný bod působí akční tíhová síla G a reakční síla v závěsu S. Kromě toho zavedeme d’Alembertovu sílu Du jako náhradu unášivého pohybu závěsného bodu. Pak již můžeme sestavit pohybovou rovnici matematického kyvadla na „jako by“ pevném závěsu. Zde tečné a normálové zrychlení jsou : Vlastní pohybovou rovnicí je první z obou rovnic : Druhá může sloužit k výpočtu síly v závěsu : Vlastní pohybovou rovnici pak ještě upravíme :
au f f w, e r an S at f m Du G Dynamika I, 13. přednáška Postup budeme demonstrovat na úloze matematického kyvadla. Hmotný bod o hmotnost m je zavěšen na nehmotném závěsu délky r. Závěsný bod se pohybuje s konstantním zrychlením au. Poloha závěsu s hmotným bodem je dána úhlem sklonu f od svislice. Na hmotný bod působí akční tíhová síla G a reakční síla v závěsu S. Kromě toho zavedeme d’Alembertovu sílu Du jako náhradu unášivého pohybu závěsného bodu. Vlastní pohybová rovnice je nelineární diferenciální rovnicí II. řádu : Řešení v uzavřeném tvaru f = f(t) neumíme nalézt. Můžeme provést řešení numerické. f w e t Zajímavé (a jednoduché) je řešení ustáleného stavu. Kývavý pohyb jsme popsali jako netlumený. Jak však již bylo zmíněno, každé kmitání je tlumené (zde např. odporem vzduchu). Časem se tedy kývání ustálí v jisté poloze (f=fust), úhlové zrychlení pak již bude nulové e=0.
au f f w, e r an S at f m Du G Dynamika I, 13. přednáška Postup budeme demonstrovat na úloze matematického kyvadla. Hmotný bod o hmotnost m je zavěšen na nehmotném závěsu délky r. Závěsný bod se pohybuje s konstantním zrychlením au. Poloha závěsu s hmotným bodem je dána úhlem sklonu f od svislice. Na hmotný bod působí akční tíhová síla G a reakční síla v závěsu S. Kromě toho zavedeme d’Alembertovu sílu Du jako náhradu unášivého pohybu závěsného bodu. Alternativní řešení je diferenciální rovnice I. řádu : V tomto případě nalezneme řešení poměrně snadno separací proměnných a integrováním. při počátečních podmínkách : t=0 ... f=0, w=0 pro maximální úhel výkyvu platí w(f=fmax) = 0 :
Dynamika I, 13. přednáška Jak víme z teorie současných pohybů, výsledné zrychlení je dáno třemi složkami (příspěvky) : zrychlení unášivého pohybu, zrychlení relativního pohybu, Coriolisovo zrychlení. Po roznásobení hmotností : Po přeuspořádání : První člen na pravé straně je (dle základní pohybové rovnice) : Druhý člen představuje d’Alembertovu sílu unášivého pohybu : Třetí člen představuje d’Alembertovu sílu, příslušející Coriolisovu zrychlení : kde Coriolisovo zrychlení je : Pohybová rovnice relativního pohybu pak má tvar : Řešení dynamiky relativního pohybu pak můžeme shrnout takto : Unášivý pohyb nahradíme příslušnou d’Alembertovou silou. Zavedeme d’Alembertovu sílu, příslušející Coriolisovu zrychlení. Relativní pohyb řešíme jako by se jednalo o základní pohyb, přičemž do součtu sil zahrneme i obě tyto d’Alembertovy síly.
aCor vrel, arel w w Dn m r m r f an N vrel, arel T DCor Dynamika I, 13. přednáška Odstředivý vrhač je buben, rotující konstantní úhlovou rychlostí w (unášivý pohyb), opatřený radiální drážkou. V ní se pohybuje projektil o hmotnosti m. Budeme řešit relativní pohyb projektilu v drážce (směr r). Buben leží ve vodorovné rovině, tíhová síla působí kolmo k rovině pohybu, proto s ní nebudeme počítat. Zrychlení projektilu je trojí : at = e·r = 0 - unášivé tečné zrychlení, an = w2·r - unášivé normálové zrychlení, arel- relativní zrychlení, aCor = 2·w·vrel - Coriolisovo zrychlení. Na projektil působí normálová reakce N (kolmo k drážce), třecí síla T = N·f (f je koeficient tření) proti směru pohybu. D’Alembertovy síly jsou : unášivý pohyb, tečný směr unášivý pohyb, normálový směr Coriolisovo zrychlení Z rovnice rovnováhy pro směr kolmo k drážce vyplývá : Třecí síla je : Konečně pohybová rovnice relativního pohybu je :
aCor vrel, arel w w Dn m r m r f an N vrel, arel T DCor Dynamika I, 13. přednáška Odstředivý vrhač je buben, rotující konstantní úhlovou rychlostí w (unášivý pohyb), opatřený radiální drážkou. V ní se pohybuje projektil o hmotnosti m. Budeme řešit relativní pohyb projektilu v drážce (směr r). Pohybová rovnice relativního pohybu : Řešení hledáme ve tvaru : Další řešení již není záležitostí dynamiky ale matematiky.
aCor vrel, arel w w Dn m r m r f an N vrel, arel T DCor Dynamika I, 13. přednáška Odstředivý vrhač je buben, rotující konstantní úhlovou rychlostí w (unášivý pohyb), opatřený radiální drážkou. V ní se pohybuje projektil o hmotnosti m. Budeme řešit relativní pohyb projektilu v drážce (směr r). Pohybová rovnice relativního pohybu : Řešení hledáme ve tvaru : Sestavíme charakteristickou rovnici : Její řešení je : je kladný, Zde kořen kořen je záporný. integrační konstanty C1 a C2 určíme z počátečních podmínek. V řešení : t=0 ... počáteční poloha projektilu v drážce počáteční rychlost
aCor vrel, arel w w Dn m r m r f an N vrel, arel T DCor Dynamika I, 13. přednáška Odstředivý vrhač je buben, rotující konstantní úhlovou rychlostí w (unášivý pohyb), opatřený radiální drážkou. V ní se pohybuje projektil o hmotnosti m. Budeme řešit relativní pohyb projektilu v drážce (směr r). Relativní pohyb : Integrační konstanty : Kořen l1 je kladný a člen C1·el1·t (v grafu červeně) představuje exponenciální nárůst. Kořen l2 je záporný a člen C2·el2·t (v grafu modře) se limitně blíží nule. 40 r [mm] 20 0 0 0.005 0.01 0.015 t [s]