Download
1 / 58
620 likes | 938 Views
Chapter 3 Simple Supervised learning. The Threshold Logic Unit (TLU), McCulloch&Pitts, 1943 is the simplest model of an artificial neuron. TLU is the feedforward structure, which only one of several available. The feedforward is used to place an

E N D
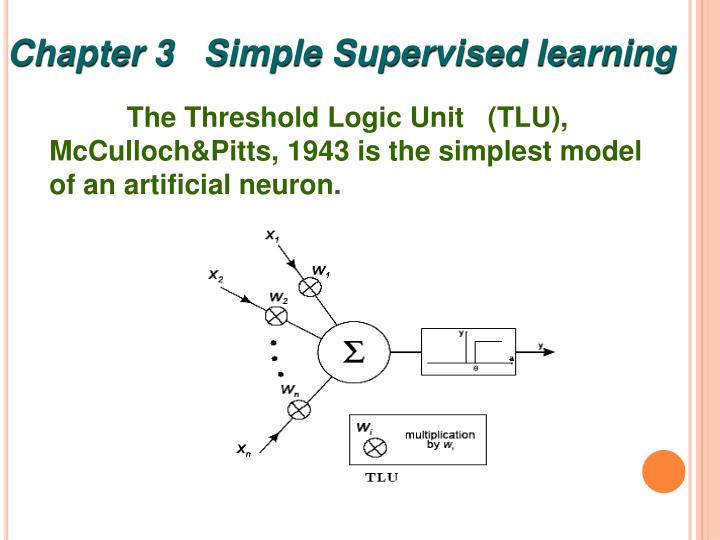
Chapter 3 Simple Supervised learning The Threshold Logic Unit (TLU), McCulloch&Pitts, 1943 is the simplest model of an artificial neuron.
TLU is the feedforward structure, which only one of several available. The feedforward is used to place an input pattern into one of several classes according to the resulting pattern of outputs.
The requirements of McCulloch-Pitts • The activation is binary. (1 is fire or 0 is not fire) • The neurons are connected by directed, weighted paths. • 3. A connection path is excitatory if the weight on the path is positive; otherwise it is inhibitory. (All excitatory connections into a particular neuron have the same weights)
The requirements of McCulloch-Pitts • Each neuron has a fixed threshold such that if the net input is greater than threshold, the neuron fires. • The threshold is set so that inhibition is absolute. That is, any nonzero inhibitory input will prevent the neuron from firing. • 6. It takes one time step for a signal to pass over one connection link.
2 X1 2 Y X2 -1 X3 Simple McCulloch-Pitts Architecture
Algorithm The weights for neuron are set, together with the threshold for the neuron’s activation function, thus the neuron will perform a simple logic function. We used the simple neurons as building blocks, that can model any function that can be represented as a logic function. Rather than a training algorithm, it is used to determine the values of weights and threshold.
W1 X1 Y X2 W2 Simple networks for logic functions The binary form of the functions for AND, OR and AND NOT are defined for reference the neuron’s activation function. This defined the threshold on Y unit to be 2.
AND function gives the following four training input, target output pairs : X1 X2 Y 0 0 0 0 1 0 1 0 0 1 1 1 จะสามารถกำหนด w1 และ w2 มีค่าเท่ากับ ?
OR function gives the following four training input, target output pairs : X1 X2 Y 0 0 0 0 1 1 1 0 1 1 1 1 จะสามารถกำหนด w1 และ w2 มีค่าเท่ากับ ?
AND NOT function gives the following four training input, target output pairs : X1 X2 Y 0 0 0 0 1 0 1 0 1 1 1 0 จะสามารถกำหนด w1 มีค่าเท่ากับ ? และ w2 มีค่าเท่ากับ ?
XOR function x1 XOR x2 (x1 AND NOT x2) OR (x2 AND NOT x1) How to model the network for XOR function?
2.1 Pattern Classification For NN approach, we assume that there are a set of training patterns for which the correct classification is known.In the simplest case, we find the output unit represents membership in the class with a response of 1; a response of -1 (or 0) indicates the pattern is not a member of the class.
Simple Pattern Classification The activation function y_in = w1x1+ w2x2+….+ wnxn The output (bipolar value) -1 if y_in < threshold f(y_in) = 1 if y_in >= threshold
AND TLU : threshold = 3 w1, w2 = ?
2.2 The linear separation of classes Critical condition of classification : the activation equals the threshold For 2-D case :
กรณี binary input ที่กำหนด w1, w2 = 1 threshold = 1.5 : a = -1 , b =1.5
2.3 Biases and Thresholds A bias acts as a weight on a connection from a unit whose activation is always 1. Increasing the bias increases the net input to the unit. net = b + n wnxn The output -1 if net < 0 f(net) = 1 if net >= 0
Single Layer with a Binary Step Function Consider a network with 2 inputs and 1 output node (2 classes). The net output of the network is a linear function of the weights and the inputs. net = W X = x1 w1 + x2 w2y = f(net) x1 w1 + x2 w2 = 0 defines a straight line through the input space. x2 = - w1/w2 x1 <- this is line through the origin with slope -w1/w2
Bias (threshold) What if the line dividing the 2 classes does not go through the origin?
2.4 The inner products v = (1,1) และ w =(0,2)
ความสัมพันธ์ของมุมกับค่าผลคูณความสัมพันธ์ของมุมกับค่าผลคูณ
2.5 Inner products and TLUs ดังนั้น
Other interesting geometric points to note: • The weight vector (w1, w2) is normal to • the decision boundary.Proof: Suppose z1 and z2 are points on the • decision boundary.
2.6 Training TLUs • Training Methods :three kinds of methods • for training single-layer networks that do • pattern classification. • Hebb net -earliest and simplest learning rule • Perceptron -guaranteed to find the right • weights if they exist • The Adaline (uses Delta Rule) -can easily • be generalized to multi-layer • nets (nonlinear problems)
Hebb Algorithm Step 0. Initialize all weights : wi = 0 (i=1 to n) Step 1. For each input training vector and target output pair, s : t, do steps 2-4 Step 2. Set activations for input units : xi = si ( i=1 to n) Step 3. Set activation for output unit: y = t Step 4. Adjust the weights for wi(new) = wi(old) + xiy Adjust the bias b(new) = b(old) + y
2.7 Perceptron Rosenblatt introduced it in 1962. Perceptron consists of a TLU whose inputs come from a set of preprocessing association units.
Perceptron Training ใน training unit จะมีการปรับ weight vector และ threshold เพื่อได้ค่าสำหรับ การแบ่งกลุ่มที่เหมาะสม การปรับค่า weight กรณี 1
กรณี 2 โดย
Perceptron ใช้การเรียนรู้อย่างง่าย ที่เรียกว่า simple training rule จากรูป p1 คือ training input
Perceptron Algorithm Step 0. Initialize all weights : wi= 0 (i=1 to n) Set learning rate ( 0 < <= 1) Step 1. While stopping condition is false, do steps 2-6 Step 2. For each training pair s:t, do steps 3-5. Step 3. Set activation of input units: xi = si ( i=1 to n) Step 4. Compute the response of output unit: y_in = b + xiwi 1 if y_in > y = 0 if - <= y_in <= -1 if y_in < -
Perceptron Algorithm Step 5. Update the weights and bias if an error occurred for this pattern if y t wi(new) = wi(old) + xit b(new) = b(old) + t else wi(new) = wi(old) b(new) = b(old) Step 6. Test stopping condition: if no weights changed in Step2, stop; else, continue.
การบ้าน จงเขียนโปรแกรมเพื่อทำการเรียนรู้ ฟังก์ชัน OR ที่มีค่า weight 0.1, 0.2 และ threshold=0.5 โดยมี learning rate = 0.3
2.8 Perceptronas classifiers การใช้ perceptron training algorithm อาจใช้ในการแบ่งข้อมูล (linearly separable classes)
ถ้ามี 4 คลาสและจะทำการแบ่ง 2 ระนาบ จะเขียน pattern space ได้ดังรูป
เริ่มจาก train two units เพื่อทำการแบ่ง เป็น 2 กลุ่มก่อน จะได้เป็น (A B) (C D) และ (A D) (B C) ดังนี้ output
จากความสัมพันธ์ของ 2 units เป็น 2 กลุ่ม ถ้าแบ่งเป็น 4 กลุ่ม จะได้ดังนี้
โครงสร้างของ network ในการแบ่งข้อมูล
w1 x1 . . . Y wn xn b 1 2.9 ADALINE Adaptive Linear Neuron using delta rule for training. An ADALINE is a special case in which there is only one output unit. Architecture of ADALINE is a single neuron that receives input from several units.
สมการปรับค่า weight นั่นคือ เรียกว่า a training rule หรือ learning rule และ พารามิเตอร์ เรียกว่า learning rate
การเรียนรู้แบบ supervise ใน neural นั้น เป็นการเรียนรู้ข้อมูลจาก training set ซึ่ง ข้อมูลนั้นจะมีรูปแบบ output ที่กำหนดไว้แล้ว ระบบ network จะนำข้อมูลเข้ามาทำงาน ภายใต้ learning rule เพื่อปรับค่า weight จนกระทั่งได้ค่า weight ที่เหมาะสมสำหรับ นำไปใช้งานต่อไปซึ่งค่า weight ที่เหมาะสม จะพิจารณาเมื่อ network นั้น convergence ถึงจุดที่ไม่มีการเปลี่ยนแปลงข้อมูล
Training Algorithm Step 0. Initialize weights. (Small random values) set learning rate . Step 1. While stopping condition is false, do Step 2-6. Step 2. For each bipolar training pair s:t, do Step 3-5. Step 3. Set activations of input units, i=1,…,n xi = si Step 4. Compute net input to output y_in = b + xiwi Step 5. Update bias and weights b(new) = b(old)+(t-y_in) wi(new) = wi(old )+(t-y_in)xi Step 6. Test for stopping condition.
2.10 Delta rule : minimizing an error 2.10.1 Hebb’s learning law From linear associator network, the output vector y’ is derived from the input vector x by means of this formula. where W = (wij) is the m x n weight matrix.
ดังนั้น จากค่า slope ที่ยกกำลังสอง ทำให้ค่าเป็นบวกเสมอ และเมื่อคูณด้วยพารามิเตอร์ที่มีค่าเป็นลบ ส่งผลให้ สมการข้างต้นมีค่า <0 ดังนั้นจึงมีลักษณะเป็น “travelled down”
Delta rule is also known as - Widrow-Hoff rule - Least Mean Squares (LMS) rule To train the network, we adjust the weights in the network so as to decrease the cost (this is where we require differentiability). This is called gradient descent. Delta Rule: Training by Gradient Descent Revisited