Download
1 / 4
40 likes | 154 Views
Feedback. Feedback on a controlled variable is always based upon the difference between the actual value (the measurement ) and the desired value (the reference ). This difference is called the error and the objective of the feedback system is to reduce this error to zero at all times.

E N D
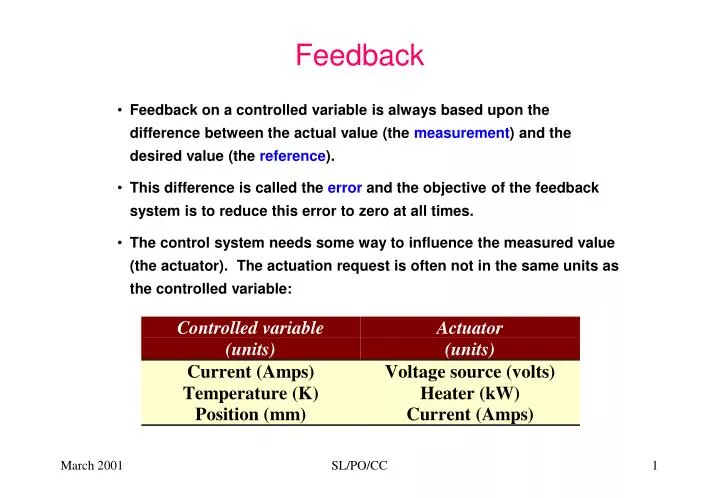
Feedback • Feedback on a controlled variable is always based upon the difference between the actual value (the measurement) and the desired value (the reference). • This difference is called the error and the objective of the feedback system is to reduce this error to zero at all times. • The control system needs some way to influence the measured value (the actuator). The actuation request is often not in the same units as the controlled variable: SL/PO/CC
Transfer Functions and other stuff... • The relationship between the actuator and the measurement is described by the plant transfer function. • The measurement will also be influenced by noise and other disturbances. • If the noise and disturbances were negligible, and the plant transfer function was known precisely, then feedback would not be needed. A feedforward system would suffice. • In the real world, noise and disturbances are normally not negligible, and the plant transfer function is not known precisely, so feedback is required. • Often, feedforward is combined with feedback for better performance. In this case, the feedback compensates just for the noise, disturbances and errors in the model of the plant transfer function. SL/PO/CC
Time delay and phase delay • All real systems will include a delay between actuation and response. • A constant time delay would imply a phase delay = k.f, where f is the frequency and k is a constant. • This will limit the bandwidth of the feedback because when reaches 180 degrees, it becomes positive feedback and the system oscillates. SL/PO/CC
Digital Regulation • The RST formulation of a digital feedback system attempts to make the combined response of controller plus plant equal to z-1. • This means a delay of one iteration. • The RST iteration rate will be between 6 and 25 times the closed loop bandwidth. • A predefined reference function will be started one iteration early to compensate for the delay. • Obviously, with a real-time reference, the delay cannot be compensated and an outer control loop (e.g. orbit or tune) will have to accept the RST delay as part of the over all delay (measurement, network, computation). SL/PO/CC