Download
1 / 1

E N D
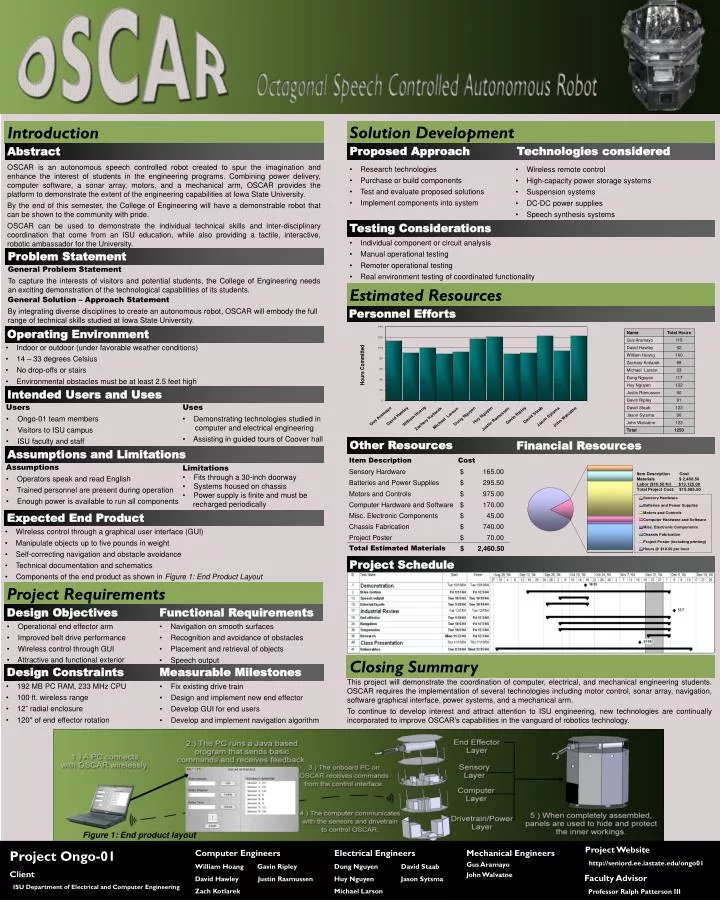
Introduction Abstract • OSCAR is an autonomous speech controlled robot created to spur the imagination and enhance the interest of students in the engineering programs. Combining power delivery, computer software, a sonar array, motors, and a mechanical arm, OSCAR provides the platform to demonstrate the extent of the engineering capabilities at Iowa State University. • By the end of this semester, the College of Engineering will have a demonstrable robot that can be shown to the community with pride. • OSCAR can be used to demonstrate the individual technical skills and inter-disciplinary coordination that come from an ISU education, while also providing a tactile, interactive, robotic ambassador for the University. Problem Statement General Problem Statement To capture the interests of visitors and potential students, the College of Engineering needs an exciting demonstration of the technological capabilities of its students. • General Solution – Approach Statement • By integrating diverse disciplines to create an autonomous robot, OSCAR will embody the full range of technical skills studied at Iowa State University. Operating Environment • Indoor or outdoor (under favorable weather conditions) • 14 – 33 degrees Celsius • No drop-offs or stairs • Environmental obstacles must be at least 2.5 feet high Intended Users and Uses • Users • Ongo-01 team members • Visitors to ISU campus • ISU faculty and staff • Uses • Demonstrating technologies studied in computer and electrical engineering • Assisting in guided tours of Coover hall Assumptions and Limitations • Assumptions • Operators speak and read English • Trained personnel are present during operation • Enough power is available to run all components • Limitations • Fits through a 30-inch doorway • Systems housed on chassis • Power supply is finite and must be • recharged periodically Expected End Product • Wireless control through a graphical user interface (GUI) • Manipulate objects up to five pounds in weight • Self-correcting navigation and obstacle avoidance • Technical documentation and schematics • Components of the end product as shown in Figure 1: End Product Layout Project Requirements Design Objectives Functional Requirements • Operational end effector arm • Improved belt drive performance • Wireless control through GUI • Attractive and functional exterior • Navigation on smooth surfaces • Recognition and avoidance of obstacles • Placement and retrieval of objects • Speech output Design Constraints Measurable Milestones • 192 MB PC RAM, 233 MHz CPU • 100 ft. wireless range • 12” radial enclosure • 120° of end effector rotation • Fix existing drive train • Design and implement new end effector • Develop GUI for end users • Develop and implement navigation algorithm Solution Development Proposed Approach Technologies considered • Research technologies • Purchase or build components • Test and evaluate proposed solutions • Implement components into system • Wireless remote control • High-capacity power storage systems • Suspension systems • DC-DC power supplies • Speech synthesis systems Testing Considerations • Individual component or circuit analysis • Manual operational testing • Remoter operational testing • Real environment testing of coordinated functionality Estimated Resources Personnel Efforts Other Resources Financial Resources Project Schedule Closing Summary • This project will demonstrate the coordination of computer, electrical, and mechanical engineering students. OSCAR requires the implementation of several technologies including motor control, sonar array, navigation, software graphical interface, power systems, and a mechanical arm. • To continue to develop interest and attract attention to ISU engineering, new technologies are continually incorporated to improve OSCAR’s capabilities in the vanguard of robotics technology. Figure 1: End product layout Project Website http://seniord.ee.iastate.edu/ongo01 Project Ongo-01 Computer Engineers William Hoang Gavin Ripley David Hawley Justin Rasmussen Zach Kotlarek Electrical Engineers Dung Nguyen David Staab Huy Nguyen Jason Sytsma Michael Larson Mechanical Engineers Gus Aramayo John Walvatne Client ISU Department of Electrical and Computer Engineering Faculty Advisor Professor Ralph Patterson III