Download
1 / 7
70 likes | 385 Views
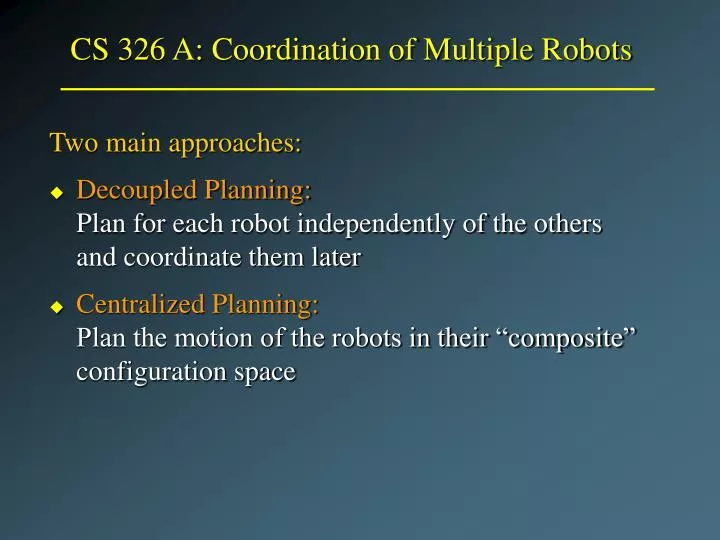
CS 326 A: Coordination of Multiple Robots Two main approaches: Decoupled Planning: Plan for each robot independently of the others and coordinate them later Centralized Planning: Plan the motion of the robots in their “composite” configuration space Planning with Moving Obstacles

E N D
CS 326 A: Coordination of Multiple Robots Two main approaches: • Decoupled Planning:Plan for each robot independently of the others and coordinate them later • Centralized Planning:Plan the motion of the robots in their “composite” configuration space
Planning with Moving Obstacles • Moving obstacles require planning a trajectory t : [t1,t2] Fi.e., a path indexed by time • A trajectory is best represented configuration x time space CT. In this space a trajectory is a continuous curve whose tangent always projects positively onto the time axis • Obstacles map as forbidden regions into CT. Constraints on velocity constrain tangents to t. Constraints on acceleration constrain curvature of t (See class #9 on Kinodynamic Planning + Programming project)
Example t y x
Coordination of Multiple Robots • Does not require explicit introduction of time (except if there are moving obstacles) • Only requires using the same parameter to index the paths of the coordinated robots • Using the same indexing parameter corresponds to fixing the relative velocities of the robots
Decoupled Planning • Pure velocity tuning:(1) Separately plan the path of each robot to avoid collision with (static) obstacles(2) Compute the relative velocities of the robots to avoid inter-robot collision (e.g., coordination diagram) • Robot prioritization:- Plan path of a first robot in its configuration space- Iterate:Plan trajectory of ith robot in its configuration x time space assuming that robots 1,…,i-1 are obstacles moving at some velocities
Centralized Planning • Plan a collision-free path in the composite configuration C1x C2 x…x Cpspace of the robots • Forbidden regions in the composite configuration space are all configurations where either a robot collide with an obstacle or two robots collide with one another • The projection of this path into Ci is the path of the ith robot
Pros and Cons • Assume p robots with n degrees of freedom each. • Worst-case complexity of centralized planning ison the order of enp • Worst-case complexity of decoupled planning ison the order of pen << enp • But decoupled planning is incomplete