Download
1 / 1
10 likes | 143 Views
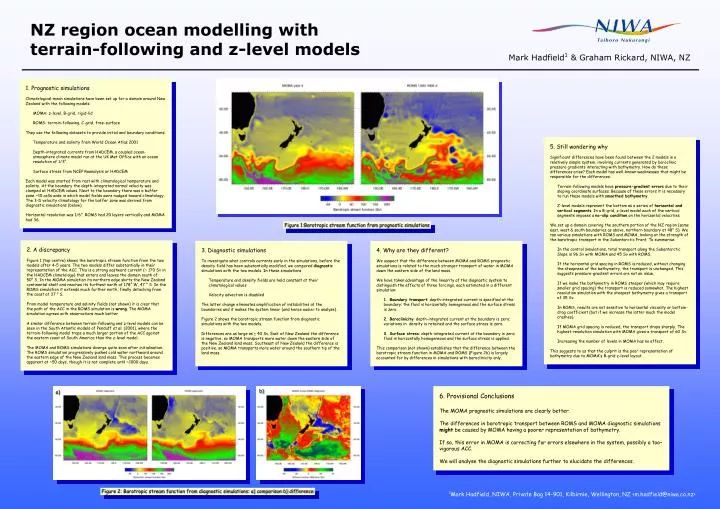
Mark Hadfield 1 & Graham Rickard, NIWA, NZ. 1. Prognostic simulations Climatological-mean s imulations have been set up for a domain around New Zealand with the following models : MOMA: z-level, B-grid, rigid-lid ROMS: terrain-following, C-grid, free-surface

E N D
Mark Hadfield1 & Graham Rickard, NIWA, NZ • 1. Prognostic simulations • Climatological-mean simulations have been set up for a domain around New Zealand with the following models: • MOMA: z-level, B-grid, rigid-lid • ROMS: terrain-following, C-grid, free-surface • They use the following datasets to provide initial and boundary conditions: • Temperature and salinity from World Ocean Atlas 2001 • Depth-integrated currents from HADCEM, a coupled ocean-atmosphere climate model run at the UK Met Office with an ocean resolution of 1/3° • Surface stress from NCEP Reanalysis or HADCEM • Each model was started from rest with climatological temperature and salinity. At the boundary the depth-integrated normal velocity was clamped at HADCEM values. Next to the boundary there was a buffer zone ~10 cells wide in which model fields were nudged toward climatology. The 3-D velocity climatology for the buffer zone was derived from diagnostic simulations (below). • Horizontal resolution was 1/6°. ROMS had 20 layers vertically and MOMA had 36. • 5. Still wondering why • Significant differences have been found between the 2 models in a relatively simple system, involving currents generated by baroclinic pressure gradients interacting with bathymetry. How do these differences arise? Each model has well-known weaknesses that might be responsible for the differences: • Terrain-following models have pressure-gradient errors due to their sloping coordinate surfaces. Because of these errors it is necessary to run these models with smoothed bathymetry. • Z-level models represent the bottom as a series of horizontal and vertical segments. In a B-grid, z-level model each of the vertical segments imposes a no-slip condition on the horizontal velocities. • We set up a domain covering the southern portion of the NZ region (same east, west & south boundaries as above, northern boundary at 48° S). We ran various simulations with ROMS and MOMA, looking at the strength of the barotropic transport in the Subantarctic Front. To summarise: • In the control simulations, total transport along the Subantarctic Slope is 96 Sv with MOMA and 45 Sv with ROMS. • If the horizontal grid spacing in ROMS is reduced, without changing the steepness of the bathymetry, the transport is unchanged. This suggests pressure-gradient errors are not an issue. • If we make the bathymetry in ROMS steeper (which may require smaller grid spacing) the transport is reduced somewhat. The highest resolution simulation with the steepest bathymetry gives a transport of 35 Sv. • In ROMS, results are not sensitive to horizontal viscosity or bottom-drag coefficient (but if we increase the latter much the model crashes). • If MOMA grid spacing is reduced, the transport drops sharply. The highest-resolution simulation with MOMA gives a transport of 60 Sv. • Increasing the number of levels in MOMA has no effect. • This suggests to us that the culprit is the poor representation of bathymetry due to MOMA’s B-grid z-level layout. NZ region ocean modelling withterrain-following and z-level models Figure 1:Barotropic stream function from prognostic simulations 2. A discrepancy Figure 1 (top centre) shows the barotropic stream function from the two models after 4–5 years. The two models differ substantially in their representation of the ACC. This is a strong eastward current (~ 170 Sv in the HADCEM climatology) that enters and leaves the domain south of 50° S. In the MOMA simulation its northern edge skirts the New Zealand continental shelf and reaches its furthest north at 178° W, 47 ° S. In the ROMS simulation it extends much further north, finally detaching from the coast at 37 ° S. From model temperature and salinity fields (not shown) it is clear that the path of the ACC in the ROMS simulation is wrong. The MOMA simulation agrees with observations much better. A similar difference between terrain-following and z-level models can be seen in the South Atlantic models of Penduff et al. (2001), where the terrain-following model traps a much larger portion of the ACC against the eastern coast of South America than the z-level model. The MOMA and ROMS simulations diverge quite soon after initialisation. The ROMS simulation progressively pushes cold water northward around the eastern edge of the New Zealand land mass. This process becomes apparent at ~50 days, though it is not complete until ~1000 days. • 3. Diagnostic simulations • To investigate what controls currents early in the simulations, before the density field has been substantially modified, we compared diagnostic simulations with the two models. In these simulations • Temperature and density fields are held constant at their climatological values • Velocity advection is disabled • The latter change eliminates amplification of instabilities at the boundaries and it makes the system linear (and hence easier to analyse). • Figure 2 shows the barotropic stream function from diagnostic simulations with the two models. • Differences are as large as ± 40 Sv. East of New Zealand the difference is negative, so MOMA transports more water down the eastern side of the New Zealand land mass. Southeast of New Zealand the difference is positive, so MOMA transports more water around the southern tip of the land mass. • 4. Why are they different? • We suspect that the difference between MOMA and ROMS prognostic simulations is related to the much stronger transport of water in MOMA down the eastern side of the land mass. • We have taken advantage of the linearity of the diagnostic system to distinguish the effects of three forcings, each estimated in a different simulation: • 1. Boundary transport: depth-integrated current is specified at the boundary; the fluid is horizontally homogenous and the surface stress is zero. • 2. Baroclinicity: depth-integrated current at the boundary is zero; variations in density is retained and the surface stress is zero. • 3. Surface stress: depth-integrated current at the boundary is zero; fluid is horizontally homogeneous and the surface stress is applied. • This comparison (not shown) establishes that the difference between the barotropic stream function in MOMA and ROMS (Figure 2b) is largely accounted for by differences in simulations with baroclinicity only. 6. Provisional Conclusions The MOMA prognostic simulations are clearly better. The differences in barotropic transport between ROMS and MOMA diagnostic simulations might be caused by MOMA having a poorer representation of bathymetry. If so, this error in MOMA is correcting for errors elsewhere in the system, possibly a too–vigorous ACC. We will analyse the diagnostic simulations further to elucidate the differences. b) a) Figure 2: Barotropic stream function from diagnostic simulations: a) comparison b) difference 1Mark Hadfield, NIWA, Private Bag 14-901, Kilbirnie, Wellington, NZ <m.hadfield@niwa.co.nz>