Download
1 / 1
10 likes | 182 Views
Robotics at HMC: Summer 2008 Devin Smith '09, Hannah Hoersting '09, Lesia Bilitchenko '10 (Cal Poly Pomona), Sabreen Lakhani '11, Becky Green '11, Pam Strom '11, Kate Burgers '11, Zeke Koziol '10, Elaine Shaver '09, Peter Mawhorter '08, and Zachary Dodds.

E N D
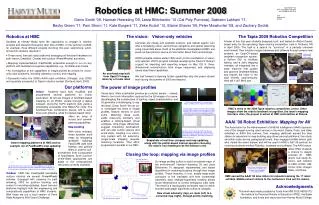
Robotics at HMC: Summer 2008 Devin Smith '09, Hannah Hoersting '09, Lesia Bilitchenko '10 (Cal Poly Pomona), Sabreen Lakhani '11, Becky Green '11, Pam Strom '11, Kate Burgers '11, Zeke Koziol '10, Elaine Shaver '09, Peter Mawhorter '08, and Zachary Dodds Robotics at HMC The vision: Vision-only vehicles The Tapia 2009 Robotics Competition Students at Harvey Mudd have the opportunity to engage in robotics projects and research throughout their time at HMC. In the summer of 2008, for example, three different projects involving first-year, sophomore, junior, and senior students resulted in • Three novel, low-cost robot platforms leveraging off-the-shelf hardware for both indoor (Qwerkbot, Create) and outdoor (PowerWheels) autonomy • Mapping implementations (FastSLAM) accessible enough to run on any platform with landmark-recognition capabilities, e.g., Scribbler and Create • An investigation of the capabilities of image profiles as a basis for vision-only robot autonomy, including odometry, control, and mapping • Successful entry into 2008's AAAI robot exhibition (Chicago; July, 2008) and (possibly successful) to Tapia's robotics contest (Portland; April, 2009). A team of four first-year students designed, built, and tested an iRobot Create-based entry for the upcoming Tapia robotics competition, held in Portland, OR in April 2009. The task is a search for "survivors" in a partially unknown environment: their solution merges hardware and software through several new Cameras are cheap and available sensors, and natural agents (us!) offer a tantalizing vision: autonomous navigation and spatial reasoning using visual data alone. Each of the platforms investigated at HMC use pixels as their primary source of information about their surroundings. 2008's projects extend earlier HMC work on the foundations of vision-only vehicles. 2007's projects included revamping the OpenCV library's support for importing and exporting images on Mac OS X; three-dimensional reconstruction from image sequences; and deploying robots atop these capabilities. We look forward to layering further capabilities atop this year's student work during the summer of 2009 and beyond. systems: an OpenCV-based landmark recognition system, a Python GUI to facilitate testing, and a Java mapping interface, all integrated into a state machine that guides and governs landmark-finding and returns the robot to the start entirely autonomously. How will it do? We'll see… . centering and approaching a new marker parallel-park adjustment An overhead map built from OpenCV images taken by a Create robot marker ID'ed; reverting to wall-following Our platforms The power of image profiles markers Indoor Students have built, modified, and programmed several platforms for indoor exploration. At left are images of landmark-based mapping on an iRobot Create through a laptop onboard. Using the OLPC platform (left) yields a remarkably accessible One Robot Per Child. The Scribbler/Fluke combination (below, left) is even more cost-effective, while the Qwerk-based robot Visual input offers substantial promise as a robotic sensor -- indeed, there is too much information captured by the 2d images of a scene: disentangling the contributions of lighting, object characteristics, and 3d geometry is challenging, to say sonars map robot 15 video frames and about 15° separate these images, creating a visual compass from profiles. state the least. Devin Smith '09 set out to investigate the limits of image profiles, feature vectors of pixel sums. Matching these sums yields video-only odometry and enables a camera-based virtual compass. Intra-image differences suggest interesting destinations and can also control velocity and avoid walls, resulting in a vision-only system with full autonomy. Larger-scale mapping requires matching locations. That effort progressed in parallel in our REU: HMC's entry to the 2009 Tapia robotics competition, center. Other images show the robot's landmark recognition, the team's mapping interface. Also, the project in action at HMC and inaction at Panera. The plots below compare our visual odometry (right) with RatSLAM's original, at left. Our approach better estimates sharp corners and overall topology, as the robot did, in fact, intersect its path where shown: offers an array of sonars and camera-panning capabilities. Map-building With vision onboard, these systems build maps by integrating landmark sightings FastSLAM uses both Kalman and particle filters in order to cull AAAI '08 Robot Exhibition: Mapping for All The Association for the Advancement of Artificial Intelligence (AAAI) sponsors one of the longest-running robot venues in the world. Elaine, Peter, and Zeke exhibited at AAAI this summer; their mapping platforms earned the blue ribbon for education for map-building atop three low-cost platforms; the robots smoothly scale across pedagogical levels: they engaged middle-school girls who visited the event (below) and will be used in HMC's Fall '08 seminar for incoming students entitled Robotics: hardware and software. The AAAI venue The yellow curve is an image profile, the intensity sum of the image's pixels; the red curve measures the absolute changes in that yellow profile - it offers a heuristic for identifying "interesting" headings for the robot to pursue. Snapshots of real-time compass and map updating, along with the profile-based interest operator choosing the robot's next heading to be the hallway's end. Indoor mapping platforms at HMC and an example run of FastSLAM's map-updating: offers HMC students a chance to deeply consider AI. HMC alums now study AI, vision, and robotics at CMU, UCSD, UW, UCLA, Utah, Oregon State, and Duke. possibilities from a population of hypotheses. Such survival-of-the-fittest approaches can adapt to the computational resources currently available. Closing the loop: mapping via image profiles the raw odometry from a four-loop run Do image profiles suffice to build consistent maps of the environment? Hannah Hoersting '09 and Lesia Bilitchenko '10 designed, implemented, and tested algorithms for matching locations through their image profiles. These matches, in turn, enable large-scale correction of the inevitable drift from incremental odometric data. Multiple-hypothesis tracking allows future observations to correct ambiguous past data. The result is a topologically consistent map for which shortest-path graph algorithms suffice to navigate. An image from leg 6… On the left the red circle represents the robot's (badly incorrect) odometry and the green show estimated true positions within their maps' landmarks, as the One-robot-per-child platform navigates among the landmarks to the right. Elaine Shaver '09 guiding middle-school visitors to AAAI as they problem-solve with HMC's accessible platforms. Outdoor HMC has investigated accessible outdoor robotics via several PowerWheels vehicles. Equipped with cameras for path following, GPS for position tracking, and sonars for avoiding obstacles, these low-cost platforms highlight both the engineering and computationalcapabilities of HMC students. With these we run a local version of Penn State Abington's Mini Grand Challenge. … matching another image from leg 10 HMC earned the AAAI '08 blue ribbon for education among the 17 robot exhibits. Middle-school visitors to the conference tried out the robots. Acknowledgments This work was made possible by funds from NSF DUE #0536173, the Institute for Personal Robots in Education (IPRE), the Baker foundation, and funds and resources from Harvey Mudd College. Raw visual odometry (top), en route (left) to a corrected map (right), through profile matching after matching one segment after matching all segments