Download
1 / 40
440 likes | 1.96k Views
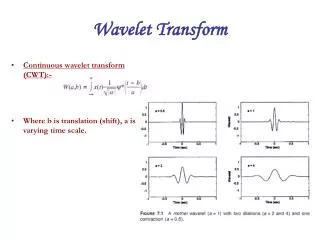
4 The z-transform การแปลงแซด. ผศ.ดร. พีระพล ยุวภูษิตานนท์ ภาควิชา วิศวกรรมอิเล็กทรอนิกส์. เป้าหมาย. นศ รู้จักความหมายของการแปลง แซด นศ เข้าใจประโยชน์และการนำการแปลงแซด ไปใช้งาน. ทำไมต้องแปลงแซด ? . เราใช้การแปลง DTFT เพื่อช่วยในการวิเคราะห์สัญญาณไม่ต่อเนื่องทางเวลาโดยใช้

E N D
4 The z-transformการแปลงแซด ผศ.ดร. พีระพล ยุวภูษิตานนท์ ภาควิชา วิศวกรรมอิเล็กทรอนิกส์ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
เป้าหมาย • นศ รู้จักความหมายของการแปลง แซด • นศ เข้าใจประโยชน์และการนำการแปลงแซด ไปใช้งาน EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
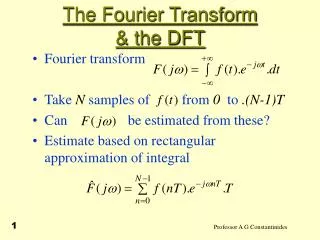
ทำไมต้องแปลงแซด ? • เราใช้การแปลง DTFT เพื่อช่วยในการวิเคราะห์สัญญาณไม่ต่อเนื่องทางเวลาโดยใช้ • และยิ่งมีประโยชน์ ในการวิเคราะห์ในเชิงความถี่ • แต่ DTFT เป็นการแปลงที่ใช้กับสัญญาณ steady–state(เช่น cos และ sin ) แต่ใช้กับสัญญาณที่สำคัญบางอย่างไม่ได้ เช่น u(n) หรือ nu(n) • การแปลงแซด (Z-transform) ให้คำตอบได้ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
Im Re การแปลงแซด (z-Transform) • สำหรับ สัญญาณ x(n) จะมีการแปลงแซดเป็น • z หมายถึง “ตัวแปรเชิงซ้อน” ซึ่งเราจะให้เป็น • ซึ่งมีความหมายถึง “ขนาด” และ “เฟส” EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
การแปลงแซด (z-transform) (ต่อ) หาก “ขนาด” มีค่า เท่า หนึ่ง ( ) จะได้ เราจะได้ ว่า การแปลง z กลายเป็นการแปลงฟูเรียร์ การแปลงฟูริเยร์เป็นกรณีพิเศษ ของการแปลงแซด EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
ตัวอย่าง 1 0.8 h(n) 0.7 0.6 n 1 -1 2 0 วิธีทำ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
คูณสมบัติการแปลงแซดที่สำคัญคูณสมบัติการแปลงแซดที่สำคัญ • การเลื่อน • การประสาน • การคูณ x(n) ด้วย n EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
บริเวณการลู่เข้า (Region Of Convergence ) • พิจารณา ได้การแปลง z 0 หรือ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
บริเวณการลู่เข้า (ต่อ) ลองดู 0 หรือ ต่างx(n) คำตอบเหมือนกัน อะไรคือความแตกต่าง? EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
บริเวณการลู่เข้า ROC คือ บริเวณสีเทา เป็นบริเวณที่ทำให้สมการเป็นจริง Im Im ROC ROC Re Re โพล ROC อยู่นอกวงกลมรัศมี ROC อยู่ในวงกลมรัศมี EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
ตัวอย่าง จงหาผลการแปลง Z และ บริเวณการลู่เข้าของ วิธีทำ เทอม แรก ROC คือ บริเวณ เทอม สอง ROC คือ บริเวณ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
บริเวณการลู่เข้า ROCเป็นบริเวณที่เกิดจากการ interceptionของROC ทั้งสอง Im Im ROC Re Re ROC อยู่ระหว่างวงกลม ROC ไม่มีค่า, ดังนั้นไม่มี X(z) EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
ความเป็นคอซัล (Causality) สัญญาณที่เป็นคอซัล(causal)คือสัญญาณที่มีค่าในช่วง สัญญาณที่เป็น คอซัลตรงกันข้าม (anti-causal)มีค่าในช่วง 0 0 คอซัล คอซัลตรงกันข้าม หรือดูจาก ROC ก็ได้ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
คอซัลตรงกันข้าม ROC อยู่นอกวงกลม=คอซัลROC อยู่ในวงกลม=คอซัลตรงกันข้าม • คอซัล Im Im ROC ROC Re Re โพล ROC อยู่นอกวงกลมรัศมี ROC อยู่ในวงกลมรัศมี EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
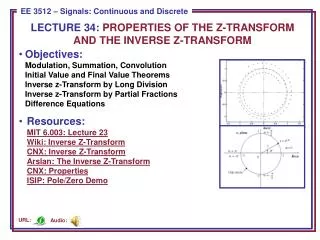
การแปลง z ผกผัน (Inversion of the z-Transform) • เพื่อแปลงกลับจาก โดเมนแซดไปเป็นโดเมนเวลา • พิจารณา • จัดอยู่ในรูป EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
โพลสามกรณี • โพลเป็นจำนวนจริงไม่ซ้ำค่า • โพลเป็นจำนวนเชิงซ้อนไม่ซ้ำค่า • โพลเป็นจำนวนซ้ำค่า • ใช้วิธี Partial Fraction Expansion (PFE) EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
1.โพลเป็นจำนวนจริงไม่ซ้ำค่า1.โพลเป็นจำนวนจริงไม่ซ้ำค่า ตัวอย่าง วิธีทำ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
หา C1 และ C2 • หา C1 • หา C2 EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
ได้ผลการแปลงผกผันแซดเป็นได้ผลการแปลงผกผันแซดเป็น EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
Table of Z-transform pairs EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
2.โพลเป็นจำนวนเชิงซ้อนไม่ซ้ำค่า2.โพลเป็นจำนวนเชิงซ้อนไม่ซ้ำค่า Y(z) แสดงโดย ตัวอย่าง วิธีทำ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
หา C1 =0 EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
หา C2 EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
แทนค่า C1 และ C2 จาก ตารางที่ 4.1 ข้อ 14 หน้า 46 EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
3.โพลเป็นจำนวนซ้ำค่า ตัวอย่าง วิธีทำ หา C1 EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
หา C2 หา C3 แทน z=1 ตรงๆเลย ไม่ได้ (เพราะอะไร?) และ สังเกต การติดค่า C1 ไว้ ต้องแทน C2=2 ลงไปก่อน EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
จัดสมการใหม่เพื่อหา C3 ใช้ การหา สลับเทอม 2 กับ3 แทนค่า z=1ในขั้นตอนนี้ เทอม C1 จะหายไปเองเมื่อ z=1 EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
แทนค่าลงไป EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
ประโยชน์ของ z-Transform • ช่วยในการหาผลตอบสนองในโดเมนเวลาของระบบ ตัวอย่าง วิธีทำ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
2. ช่วยหาผลการประสาน ตัวอย่าง วิธีทำ เราทราบว่า EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
หา inverse z-transform แปลงกลับ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
3.ช่วยหาเอาท์พุทของ difference equation ตัวอย่าง การหมุนของดาวเทียมแสดงได้ด้วย = ตำแหน่งมุม(angular position) = ทอร์ก (Torque) จากตัวขับ ให้หา y(n) ที่ x(n) เป็น วิธีทำ แปลง z EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
ได้ Transfer function ขยายออกเป็น เมื่อ คูณกลับด้วย z ตำแหน่งมุม y(n) หาได้จากการแปลง z ผกผัน EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
Transfer function เราเรียก H(z) ว่าเป็น ฟังก์ชันถ่ายโอน (Transfer function) โดยที่ ข้อกำหนด 1 y(n)เอาท์พุทของระบบ มีการแปลง z หรือROC ของ h(n) จะต้อง overlap กับ ROC ของ x(n) จึงจะมี Y(z) จากระบบ LTI ที่มีสมการความแตกต่างเป็น EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
หรือเขียนเป็น H(z) เราได้ zk= ซีโร่ pk =โพล EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
หาผลตอบสนองความถี่จากการแปลง z ถ้า ROC ครอบคลุม unit circle จะหาผลตอบสนองความถี่ของระบบได้ Transfer function Magnitude response Phase response EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
Im(z) เวคเตอร์จากโพล ไป unit circle: pk Re(z) Unit circle zl แสดงเวคเตอร์จากโพลและซีโร่ไปยัง unit circle เวคเตอร์จากซีโร่ ไป unit circle: EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
สำหรับสัญญาณ y(n) ตัวอย่าง วิธีทำ โพลซีโร่ พล๊อต ผลตอบสนองความถี่ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon
สรุป • หาผลลัพท์การแปลงแซดได้ในบางกรณีที่ใช้การแปลง DTFT ไม่ได้ • สมการการแปลงแซดให้ความหมายมากกว่าหนึ่งสัญญาณโดเมนเวลา โดยแตกต่างกันตาม ROC • การแปลงแซดช่วยหาผลลัพธ์สมการผลต่างได้ • การแปลงแซดช่วยหาผลตอบสนองความถี่ได้ EEET0485 Digital Signal Processing http://embedsigproc.wordpress.com Asst. Prof. Dr. P.Yuvapoositanon