Download
1 / 1
10 likes | 75 Views
Integration of a 3D Programming Environment with Robotics to Stimulate Interest in Computing David South, Mary Shuman, Susan Urban, Mohan Sridharan Texas Tech University 2011 NSF Research Experiences for Undergraduates Site Project. Approach Overview

E N D
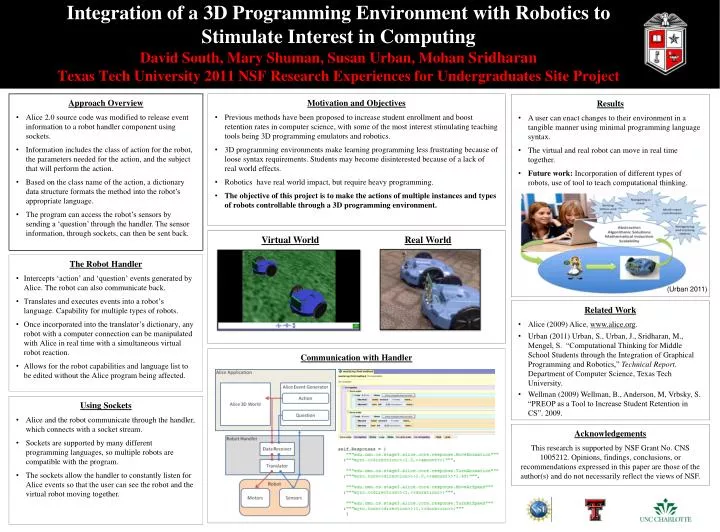
Integration of a 3D Programming Environment with Robotics to Stimulate Interest in ComputingDavid South, Mary Shuman, Susan Urban, Mohan SridharanTexas Tech University 2011 NSF Research Experiences for Undergraduates Site Project • Approach Overview • Alice 2.0 source code was modified to release event information to a robot handler component using sockets. • Information includes the class of action for the robot, the parameters needed for the action, and the subject that will perform the action. • Based on the class name of the action, a dictionary data structure formats the method into the robot’s appropriate language. • The program can access the robot’s sensors by sending a ‘question’ through the handler. The sensor information, through sockets, can then be sent back. • Motivation and Objectives • Previous methods have been proposed to increase student enrollment and boost retention rates in computer science, with some of the most interest stimulating teaching tools being 3D programming emulators and robotics. • 3D programming environments make learning programming less frustrating because of loose syntax requirements. Students may become disinterested because of a lack of real world effects. • Robotics have real world impact, but require heavy programming. • The objective of this project is to make the actions of multiple instances and types of robots controllable through a 3D programming environment. • Results • A user can enact changes to their environment in a tangible manner using minimal programming language syntax. • The virtual and real robot can move in real time together. • Future work: Incorporation of different types of robots, use of tool to teach computational thinking. • The Robot Handler • Intercepts ‘action’ and ‘question’ events generated by Alice. The robot can also communicate back. • Translates and executes events into a robot’s language. Capability for multiple types of robots. • Once incorporated into the translator’s dictionary, any robot with a computer connection can be manipulated with Alice in real time with a simultaneous virtual robot reaction. • Allows for the robot capabilities and language list to be edited without the Alice program being affected. Virtual WorldReal World (Urban 2011) • Related Work • Alice (2009) Alice, www.alice.org. • Urban (2011) Urban, S., Urban, J., Sridharan, M., Mengel, S. “Computational Thinking for Middle School Students through the Integration of Graphical Programming and Robotics,” Technical Report. Department of Computer Science, Texas Tech University. • Wellman (2009) Wellman, B., Anderson, M, Vrbsky, S. “PREOP as a Tool to Increase Student Retention in CS”. 2009. • Communication with Handler • Using Sockets • Alice and the robot communicate through the handler, which connects with a socket stream. • Sockets are supported by many different programming languages, so multiple robots are compatible with the program. • The sockets allow the handler to constantly listen for Alice events so that the user can see the robot and the virtual robot moving together. Acknowledgements This research is supported by NSF Grant No. CNS 1005212. Opinions, findings, conclusions, or recommendations expressed in this paper are those of the author(s) and do not necessarily reflect the views of NSF.