Download
1 / 38
380 likes | 399 Views
Intelligent Robots Trends and Predictions for the .Net Future. Ernest L. Hall Email:Ernie.Hall@uc.edu WWW: http://www.robotics.uc.edu Center for Robotics Research University of Cincinnati Cincinnati, OH 45221-0072. .Net Future.

E N D
Intelligent Robots Trends and Predictions for the.Net Future Ernest L. Hall Email:Ernie.Hall@uc.edu WWW: http://www.robotics.uc.edu Center for Robotics Research University of Cincinnati Cincinnati, OH 45221-0072
.Net Future • The World Wide Web is making a tremendous amount of information available that empowers everyone with access to it. • The .Net strategy promises major improvements in every aspect of computer communication. • Making communications and information available to a broader community will make intelligent robots easier to conceive of, investigate, develop, produce and use.
Making Designing, Building and Using Such Machines Child’s Play (From Tokiko)
Mission • Produce intelligent robots to serve mankind • Encourage the developmental transitions of intelligent robots ideas to reality • Educate engineers and scientists in this new and exciting technology
SME Advisory Board of Robotics International Trends Report* • PC based controllers for robots and controllers • Easier to use systems • Increased use of smart sensors • Demand for special purpose robot models • Increased information flow • Easier to deploy systems * Robotics International of the Society of Manufacturing Engineers, “RI/SME Technology Trends,” March 2001. www.sme.org.
Economic Aspects – Four Years of Billion Dollar Market Donald Vincent 3 : • “From 1992-1997, North American robotics companies posted gains in new orders of 131 percent. A total of 12,149 robots valued at over $1.1 billion were ordered in 1997, a new record. Shipments also topped $1 billion for the first time. While orders grew just 1 percent in 1997, the industry capped a string of great years, having grown 31 percent in 1992, 29 percent in 1993, 19 percent in 1994, 18 percent in 1995, and 25 percent in 1996. In 1998, the industry again topped $1 billion, although orders were down 10 percent over 1997. Due to the Asian crisis and global financial turmoil, many manufacturing companies either cut back on or postponed their robotics investments. However, in 1999, the industry marked its best year ever. Robot orders grew 60 percent, totaling 17,591 robots valued at $1.4 billion, fueled by huge orders for spot welding, material handling, assembly and arc welding robots. Robot shipments in 1999 also broke all previous records. A total of 15,063 robots valued at $1.2 billion were shipped, an increase of 39 percent in units and 17 percent in revenue over 1998.”
Weak Start in 2001 According to Kevin Ostby2, President of the RIA: • “the robotics market is clearly off to a weak start in 2001, with orders down 36% in the first quarter and the likelihood of continued sluggishness in the second quarter. While this is disappointing, it's not a surprise in light of the economic problems facing many manufacturing companies today. Capital equipment budgets are being cut, new orders are being postponed or delayed, and it's not clear to anybody when the situation will turn around. However, in the midst of these difficult times, there are positive signs that indicate demand for robotics will strengthen at some point in the not too distant future.”
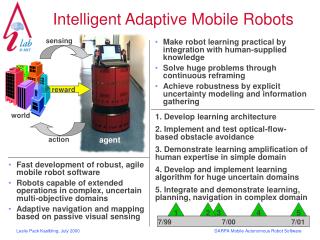
Intelligent Robots: Goals of AI • Finding new methods for extracting useful information from the environment using sensors. • Developing methods for building, updating, and retaining information from a knowledge base. • Inventing algorithms for utilizing information stored in a knowledge base to make intelligent decisions. • Finding improved methods for translating user needs into a workable software system. • Developing reusable software components that can expand toward an ultimate software system
Mechatronics • New Robot Manipulator Designs • Faster • Smaller • Repeatable • Safer • Easier to use
Concept to CAD to Practice • Mixed Sized Palletizing • Mobile Robot Design • Learning
International Ground Vehicle Competition – The Challenge • The main event • The design contest • The road debris • Follow the leader • The navigational challenge
Who Conducts the Contest? • Association for Unmanned Vehicle Systems International • Dept. of Defense • Dept. of Transportation • Corporate Sponsors
International Ground Vehicle Competition – Future Applications • Autonomous defense systems • Safer automobiles • Hospital food and patient transport systems • Industrial AGVs • Mobile robots in the home • New applications
Our Target • Designed as an easy to use kit • A multi-faceted vision • Modular design – off the shelf components • Vehicle with zero turning radius - ZTR • Minimal developmental lead time • Safety and reliability
BEARCAT III A solution towards an unmanned moving world
Requirement Capture Problem Formulation Design Enhancement Presentation & feedback Analysis Concept To Reality Output Performance Testing Conceptual Design Physical Design Design Process – Continuous Improvement
Health Monitoring System Mechanical System MotionControl System Safety System Emergency Stops Mechanical, Electrical and Operational Safety Power System Fuzzy Logic Central Controller Navigation System GPS Obstacle Avoidance System SONAR Laser Scanner Vision system Line Following Follow the leader Pothole Detection Design Strategy
Bearcat III Control Logic Remote E- Stop Futaba E-Stop Left camera Serial RS 232 Ports FSR Video Pentium Processor ISCAN I/O ISCAN Tracker Right Camera OMNI Camera Pentium based CPU Serial I/O RS 422 Ethernet Laser Scanner Right Motor Galil DMC GALIL DMC Left Motor EPIX PCI Pothole Camera Serial I/O RS 232 Motorola GPS Serial I/O RS 232 Rotating Sonar Serial I/O RS 232 Digital voltmeter Enhanced System Diagram
Mechanical System An intelligent machine needs: • A strong mechanism • A design for outdoor conditions • A shelf structure • Aluminum extrusions
Motion Control • Galil DMC motion controller • Two motors drive the system • Differential speed mechanism • 40:1 Gear boxes • Zero turning radius
Vision System Line following requires: • CCD camera • Video switch • Monitors • Iscan image tracker • Image coordinates to real world coordinates
Performance of Bearcat III • Maximum speed 5 miles per hour • 10% incline ramp climbing ability • 3 hours of operation • Obstacle detection and avoidance • Follow the leader capability • Point to point navigation • Health monitoring capability • Emergency stop
Innovative Robot • Omni-vision based autonomous mobile robotic platform • Zuoliang Cao, Jun Hu , Jin Cao • Tianjin University of Technology, Tianjin / China; Fatwire Corporation, New York /USA; University of Cincinnati, Cincinnati/ USA
Safe Predictions • Robots play golf, weld, spray paint, assemble, handle materials, load and unload machines, sheer sheep, mow lawns, cut trees, pick oranges, solve Rubik’s cube, play checkers, play black jack, play board games, fill cars with gas, make milk shakes, package hamburgers, deliver food to patients in hospitals, brain surgery. All these have been done by prototype systems at least. Some have made it to market.
Going Beyond the Teach Pendant • To reach an even higher degree of applications, a new level of learning may be required
Adaptive Critic • Learning theories such as the adaptive critic have been proposed. • In this type of learning a critic provides a grade to the controller of an action module such as a robot. • The critic may be considered as the teach programmer, customer, plant manager, line supervisor or quality inspector. • If the ultimate critic is the consumer, then the quality inspector must model the consumer’s decision and use this model in the design and manufacturing operations.
Several Levels of Intelligent Controls have been Developed • Supervised control, a trainable controller that, unlike the teaching pendant, allows responsiveness to sensory inputs. • Direct inverse control is trained for the inverse dynamic of the robot. • Neural adaptive control, neural nets combined with adaptive controllers result in greater robustness and the ability to handle nonlinearity. • Backpropagation of utility involves information flowing backward through time. • Adaptive critic method uses a critic evaluating robot performance during training • Creative control involves self initiating and corrective action
Creative Controller A new process that is “beyond the adaptive critic,” would be a creative control.
Futuristic Predictions • The ultimate goal of the use of robots always should be to help, not hurt us. • This calls for thoughtful planning, intelligent policies, and foresighted decisions on the parts of leaders in fields that will use robots, from factory owners to medical researchers.
Thank You Questions





![What Is The Future of Content Marketing [Trends and Predictions] #BtoBLive](https://cdn4.slideserve.com/7334473/slide1-dt.jpg)