Download
1 / 27
501 likes | 1.15k Views
u možňuje udržování určitých fyzikálních veličin na stanovených hodnotách v průběhu regulace zjišťují hodnoty těchto veličin a srovnávají se s hodnotami, které mají mít p odle zjištěných odchylek, se zasahuje do regulovaného procesu tak, aby odchylky byly udržovány na minimu

E N D
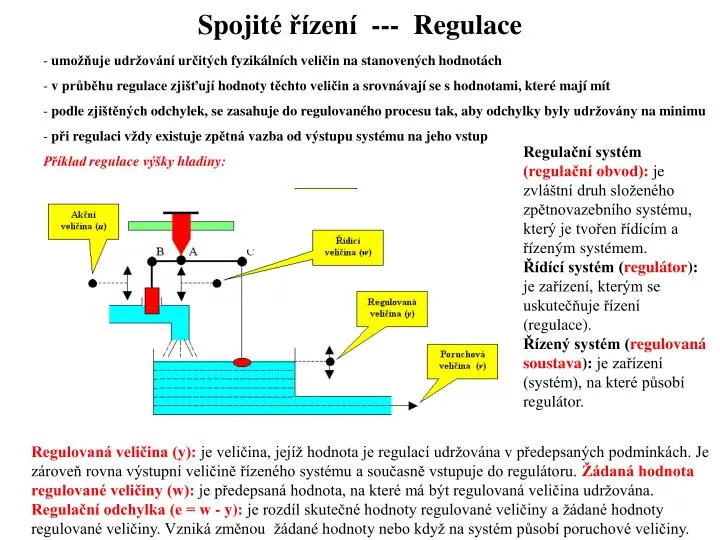
umožňuje udržování určitých fyzikálních veličin na stanovených hodnotách • v průběhu regulace zjišťují hodnoty těchto veličin a srovnávají se s hodnotami, které mají mít • podle zjištěných odchylek, se zasahuje do regulovaného procesu tak, aby odchylky byly udržovány na minimu • při regulaci vždy existuje zpětná vazba od výstupu systému na jeho vstup • Příklad regulace výšky hladiny: Spojité řízení --- Regulace Regulační systém (regulační obvod): je zvláštní druh složeného zpětnovazebního systému, který je tvořen řídícím a řízeným systémem.Řídící systém (regulátor): je zařízení, kterým se uskutečňuje řízení (regulace). Řízený systém (regulovaná soustava): je zařízení (systém), na které působí regulátor. Regulovaná veličina (y): je veličina, jejíž hodnota je regulací udržována v předepsaných podmínkách. Je zároveň rovna výstupní veličině řízeného systému a současně vstupuje do regulátoru. Žádaná hodnota regulované veličiny (w): je předepsaná hodnota, na které má být regulovaná veličina udržována. Regulační odchylka (e = w - y): je rozdíl skutečné hodnoty regulované veličiny a žádané hodnoty regulované veličiny. Vzniká změnou žádané hodnoty nebo když na systém působí poruchové veličiny.
Akční veličina (yR = výstup regulátoru; u = vstup řízeného systému): zasahuje do regulačního procesu tak, aby regulační odchylka byla minimální. Je to výstupní veličina řídícího systému a současně vstupní veličina řízeného systému.Poruchová veličina (v): je neúmyslná a nepředvídaná změna regulované veličiny.Regulace hladiny je typickým příkladem regulace na konstantní hodnotu. Blokové schéma předchozího regulačního obvodu : Regulátor přímý nepotřebuje vlastní zdroj energie a veškerou energii potřebnou ke své činnosti odebírá z regulované soustavy.Regulátor nepřímý (indirektní) je složitější než regulátor přímý, pracuje vždy s pomocným zdrojem energie.
Regulace na konstantní hodnotu: žádaná hodnota regulované veličiny je udržována na konstantní hodnotě Vlečná regulace:regulovaná veličina se mění v závislosti na jiné fyzikální veličině. Řídící veličina w není konstantní. Programovaná regulace:je zvláštním případem vlečné regulace,řídicí veličina je dána předem časovým plánem neboli programem. Rozvětvené regulační okruhy Druhy regulace kromě základních veličin jsou k dosažení lepších vlastností regulace zaváděny další pomocné veličiny jako např.: Pomocná regulovaná veličina: je veličina, která vznikne odbočením regulované veličiny v místě soustavy, kde zpoždění není ještě tak velké. Zlepšuje stabilitu obvodu. Měřená porucha:poruchová veličina se zavádí do regulátoru dříve, než by se mohla projevit na výstupu regulované soustavy Technologické schéma
Pomocná akční veličina (yR p): je druhá akční veličina, která umožňuje, aby vliv poruchy byl kompenzován dříve. Regulační obvod s pomocnou akční veličinou Další příklad
pojmem rozumíme soubor zařízení, v němž probíhá regulační pochod a v němž se ovlivňuje • regulovaná veličina • soustava je dána všeobecně tokem energie (tepelné, elektrické, tlakového vzduchu, atd.) a tokem • hmoty (kapaliny, sypkého materiálu, atd.) • u soustavy předpokládáme, že regulovaná veličina má stejnou hodnotu ve všech místech (tzv. • soustředěné kapacity), to je někdy zcela splněno např. pro tlakové nádoby, někdy jen zčásti • (v malém rozmezí změn), např. teplota v pecích nebo ve výměníku Regulované soustavy Za předpoklad nulových rušivých veličin nebo jejich působení ve složce veličiny u(t) a pro zadané počátečnípodmínky, lzedynamické vlastnosti regulované soustavyvyjádřit lineární diferenciální rovnicí s konstantními koeficienty, která pro n-tý řád soustavy má tvar Platí pro nulové počáteční podmínky: Pro známý tvar vstupního signálu u(t) můžeme použitím Laplaceovy transformace stanovit přenos regulované soustavy
Soustavy Koeficient a0je důležitým kriteriem klasifikace soustav a je označován jako součinitel autoregulace. Určuje, zda jde o regulovanou soustavu statickou nebo astatickou takto: při a0 0 - jedná se o statickou soustavu, a0 = 0 - jedná se o astatickou soustavu. Soustavy statické - po změně vstupní veličiny se soustava ustálí v novém ustáleném stavu a určité hodnotě vstupní veličiny odpovídá určitá hodnota výstupní veličiny. - řečeno jinak,po vychýlení z rovnovážného stavu jsou schopny teoreticky vždy dosáhnout nového rovnovážného stavu bez působení regulace, tedy připojení regulátoru. Soustavy astatické - po změně vstupní veličiny se výstup trvale mění a nedosáhne nového ustáleného stavu, astatická soustava je nestabilní a k dosažení stability je nutná regulace
Statické regulované soustavy Dynamické vlastnosti statické regulované soustavy n-tého řádu lze popsat přenosem: ….je zesílení statické regulované soustavy, [s] … jsou časové konstanty regulované soustavy, Stabilní chování můžeme vyšetřit pomocí výpočtu hodnot koncových bodů přechodové funkce resp. charakteristiky soustavy počáteční hodnota funkce (pro t = 0) koncová hodnota funkce (pro t = )
Vstupní funkcí u(t) pro přechodovou charakteristiku je jednotkový skok, a proto L{u(t)} = 1/s . Potom počáteční a koncová hodnota přechodové charakteristiky bude s s s s a) Regulované soustavy bezkapacitní ….statické 0. řádu Přechodová charakteristika Popis algebraickou lineární rovnicí: (lineární dif. rovnice 0.řádu) s .. Zesílení soustavy = přenos ….. Příklad soustavy
mají jednu kapacitu, která umožňuje hromadit energii nebo látku b) Regulované soustavy jednokapacitní….statické 1. řádu -- regulovaná veličina se při skokové změně akční veličiny mění ihned s určitou počáteční rychlostí, úměrnou rozdílu mezi okamžitou a konečnou hodnotou regulované veličiny -- rychlost se tedy stále zmenšuje, po delším čase se regulovaná veličina ustálí na nové (konečné) hodnotě příklad soustavy jedno-kapacitní = nádrž, která se plní vzduchem přes regulační ventil. Popis lineární diferenciální rovnicí 1.řádu Operátorový přenos a1 s Y (s) + a0 Y (s) = U (s) Po úpravě kde je .. Časová konstanta .. Zesílení soustavy Tn .. doba náběhu
c) Regulované soustavy dvoukapacitní,statické 2. řádu Příklad soustavy dvoukapacitní-- sériové zapojení dvou nádrží s regulačním ventilem, plněných vzduchem Mají dvě kapacity zařazené za sebou a dvě časové konstanty: dobu náběhu Tn a dobu průtahu Tu Rychlost změny regulované veličiny je největší v inflexním bodě. Na začátku odezvy a při dosažení rovnovážného stavu je rychlost změny nulová 1 Ks doba přechodu - Tp N = ½ T1/T2 ad 1) N < 1tlum. kmitá ad 2) N = 1na mezi ad 3) N > 1 přetlumen
Přechodové charakteristiky těchto soustav mají obdobný tvar jako přechodová charakteristika soustavy dvoukapacitní. Mají i stejné charakteristické veličiny - KS, Tu, Tn. Tyto soustavy, obdobně jako soustavy dvoukapacitní, mohou obsahovat i členy druhého řádu (setrvačné hmotnosti, indukčnosti). d) Regulované soustavy několikakapacitní…….statické n-tého řádu -- regulovatelnost statických soustav lze přibližně posoudit z poměru doby průtahu k době náběhu
Přehled statických soustav V tabulce jsou seřazeny statické regulované soustavy podle stupně řádu resp. podle počtu kapacit. Jsou uvedeny jejich diferenciální rovnice, přenosy, přechodové charakteristiky, frekvenční charakteristiky a amplitudové logaritmické charakteristiky včetně příkladů regulovaných soustav.
Astatické regulované soustavy Astatické soustavy nemají, na rozdíl od soustav statických, samoregulační schopnost. Vyplývá to ze skutečnosti, že s0 = 0. Po vyvedení soustavy z rovnovážného stavu se výstupní signál po odeznění přechodového děje mění konstantní rychlostí. Dynamické vlastnosti astatické soustavy vyjadřuje diferenciální rovnice a z ní odvozený operátorový přenos ve tvarech , kde [s-1] je tzv. statický činitel rychlosti T1, T2, ... [s] časové konstanty regulované soustavy
Obdobně jako u statických soustav vypočítáme počáteční a koncovou hodnotu přechodové charakteristiky jako limity pro t = 0 a t = podle vztahů • Protože astatické soustavy nemají autoregulaci, je možné odstranit rozvážení soustavy vzniklé poruchovou nebo jinou vstupní veličinou (akční) jen pomocí připojeného regulátoru. • Obdobně, jako soustavy statické, tak i soustavy astatické můžeme rozdělit • podle počtu kapacit s tou vyjímkou, že neexistuje astatická bezkapacitní soustava.
Astatická soustava 1. řádu … přechodová charakteristika , kde … integrační zesílení , … integrační časová konstanta
Astatická soustava 2. řádu … přechodová charakteristika Soustavu popisuje diferenciální rovnice 2. řádu bez absolutního členu:
Regulované soustavy s dopravním zpožděním regulované soustavy mohou mít také ještě dopravní zpoždění Td [s] posunutý vstupní signál u(t - Td) potom diferenciální rovnice regulované soustavy n-tého řádu s dopravním zpožděním: Po Laplaceově transformaci při použití věty o posunutí (x) v originále přenos regulované soustavy s dopravním zpožděním
Statické soustavy s dopravním zpožděním Předělat včetně p
Astatické soustavy s dopravním zpožděním Předělat včetně p
Konec přednášky Děkuji za pozornost .
Regulační obvod s pomocnou regulovanou veličinou (vlečná regulace)