Download
1 / 13
130 likes | 302 Views
官:石炭エネルギー センター (JCOAL). 統括. 学:北九州高専 吉野先生,太屋岡. 技術 支援. 産:釧路コールマイン 永田エンジニアリング. 実装. インドネシア国 西スマトラ州 オンビリン炭鉱. 図1 産 学 官 による高効率選炭 JIG プロジェクト. 原炭. = 製品炭 + 低品位炭 + 不純物 ( 石 , クズ ). 製品炭. 水. 水. 硬抜き装置. フロート. 硬 ( ズリ ). 低品位炭. 不純物 ( 石 , クズ ). 脈動水流. 1 槽. 2 槽. 図2 選炭 JIG の概要.

E N D
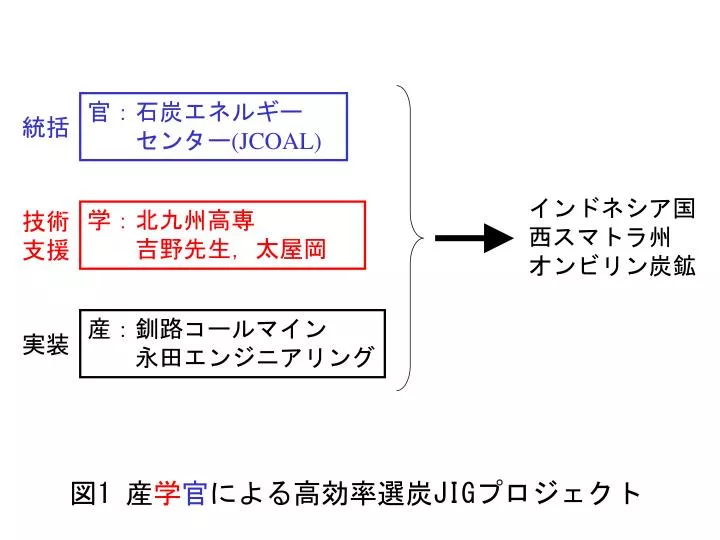
官:石炭エネルギー センター(JCOAL) 統括 学:北九州高専 吉野先生,太屋岡 技術 支援 産:釧路コールマイン 永田エンジニアリング 実装 インドネシア国 西スマトラ州 オンビリン炭鉱 図1 産学官による高効率選炭JIGプロジェクト
原炭 = 製品炭 +低品位炭 +不純物 (石, クズ) 製品炭 水 水 硬抜き装置 フロート 硬(ズリ) 低品位炭 不純物 (石, クズ) 脈動水流 1槽 2槽 図2 選炭JIGの概要
硬抜き装置 フロート高さ 測定器 フロート (比重1.45) 選炭槽 図3 製品炭・硬 境界高さ設定装置
目標値 目標フロート高さ 制御量 フロート高さ r (mm) y (mm) フロート高さ 測定器 Controller 操作量 硬抜き装置 指令周波数 水 製品炭 u (Hz) Float M 脈動水流 スターホィール型 硬抜き装置 硬 図4 フロート高さ(=選別高さ)の制御系
原炭 製品炭 1槽 2槽 脈動水流 不純物 低品位炭 図5 空気式 選炭JIGモデル実験装置
原炭 製品炭(比重1.2) 中間 (比重1.4) 硬(比重1.6) 空気式 : 制御困難 ※ 画像をクリック 脈動水流 図6 空気式 選炭JIGによる選別 ビデオ
空気式:波形制御困難 ACサーボ式:制御容易 ACサーボ モータ 箱を上下 ボールネジ 箱 製品炭 (比重1.2) 模擬原炭 網 硬 (比重1.4) 水 (a)成層 前 (b)成層 後 図7 ACサーボを用いたモデルJIG実験装置
平成19年度 太屋岡研究室 卒業研究テーマ ① 選炭JIG装置のモデリング with 池田(専1),太屋岡 目的:選炭JIG装置をARMAモデル, 補助変数法,逐次最小二乗法等を用いて モデリングし, パラメータ変動やノイズの影響を受けにくい ロバストなモデリング手法を開発する. 技術:システム同定
平成19年度 太屋岡研究室 卒業研究テーマ ② 選炭JIG装置の制御 with 木村(専2),愛宕(専1) 太屋岡 目的:セルフチューニング機能を有する制御系 を構成し, パラメータ変動やノイズの影響を受けにくい ロバストな制御系を開発する. 技術:無駄時間系,ロバスト制御
伝達関数 操作量u (Hz) 制御量y (mm) y(mm) 150 150 100 100 制御量 20 20 操作量u (Hz) 10 10 0 100 200 0 100 200 時間t (sec) 時間t (sec) (a)実機 JIG (b)モデル JIG 図8 制御対象のモデリング(現場:釧路コールマイン)
制御対象 PI 制御器 r y PI 制御 制御対象 150 制御量 y (mm) 100 PI 制御: Ziegler Nichols ステップ応答法 0 100 200 時間t (sec) (a)PI 制御 (b)ステップ応答 図9 従来のPI 制御
制御対象の伝達関数 時定数T の変動 ノミナル値 変動後 振動 大 30(sec) 56.5(sec) 150 パラメータ変動 制御量 y (mm) 100 0 100 200 T の推定 が必要 時間t (sec) 図10 パラメータ(時定数T)の変動
PI制御 ノイズ 無 ノイズ 有 PI制御 + T推定 150 150 制御量 y (mm) 制御量 y (mm) 100 100 tm tm 0 100 200 0 100 200 時間t (sec) 時間t (sec) 推定完了 推定完了 (a)Tの推定 (b)ノイズの有無 図11 時定数Tの推定
