Download
1 / 23
230 likes | 348 Views
Tilt perception during rotation about a tilted axis Rens Vingerhoets 1,2 Jan Van Gisbergen 1 Pieter Medendorp 2,3 1. Department of Biophysics 2. Nijmegen Institute for Cognition and information 3. FC Donders Centre for Cognitive Neuroimaging. {. Semi-circular canals Otoliths.

E N D
Tilt perception during rotation about a tilted axis Rens Vingerhoets1,2 Jan Van Gisbergen1 Pieter Medendorp2,3 1. Department of Biophysics 2. Nijmegen Institute for Cognition and information 3. FC Donders Centre for Cognitive Neuroimaging
{ Semi-circular canals Otoliths Introduction - Sensors Spatial orientation • Visual Cues • Vestibular System • Somatosensory Cues
Introduction - Sensors The semi-circular canals • Sensitive to rotation (angular acceleration)
Tilt Translation Introduction - Sensors The otoliths • Sensitive to acceleration caused by: • Gravity (Tilt) • Inertial acceleration (Translation) } Signal is ambiguous
Internal Model Introduction - Sensors How is the otolith ambiguity resolved? Hypothesis: canal-otolith interaction ^ g Tilt + Translation Tilt ^ a Otoliths Translation Angular ˆ ω Rotation velocity Canals
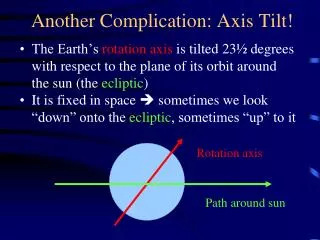
Rotation about a vertical axis Rotation about a tilted axis Introduction What is rotation about a tilted axis (OVAR)?
Illusory motion percept NU NU R LED RED Translation percept RED LED ND 0 30 60 90 120 Time (s) ND Introduction What happens during OVAR? Veridical motion percept Rotation percept Left Ear Down (LED) Nose Up (NU) Right Ear Down (RED) Nose Down (ND) 0 30 60 90 120 Time (s) What causes this illusory translation percept? Otolith signal from tilt misinterpreted as translation?
30o/s & 45o 50o/s & 45o 50o/s & 15o 30 20 Tilt underestimation (deg) 10 0 0 30 60 90 120 0 30 60 90 120 0 30 60 90 120 Time (s) Introduction – Otolith Disambiguation The model predicts a gradually increasing underestimation of tilt during OVAR
Introduction – research question • Is there evidence for the underestimation of tilt predicted by the canal-otolith interaction model? • If so, is the time course compatible with canal-signal delay?
Methods Experimental setup - Vestibular chair -
Introduction – Subjective Visual Vertical Tilt perception tested with Subjective Visual Vertical (SVV) Gravity Flash! Clockwise
Methods Experimental setup • 6 subjects • 3 dynamic conditions • - Large tilt & Low speed (45o tilt and 30o/s) • - Large tilt & High speed (45o tilt and 50o/s) • - Small tilt & High speed (15o tilt and 50o/s) • Each dynamic condition consisted of 20 runs of 120 s each • In each LED and RED phase flashed presentation of oriented line • Subjects used a toggle switch to indicate whether the line had to be more clockwise/counterclockwise to be perceived as earth-vertical • Time course of SVV determined using an adaptive staircase over runs. • 2 static conditions: 45o tilt and 15o tilt
Results – Dynamic paradigm Dynamic results of 1 subject 30o/s & 45o 50o/s & 45o 50o/s & 15o 30 20 10 Error in SVV, γ (deg) 0 -10 -20 -30 0 30 60 90 120 0 30 60 90 120 0 30 60 90 120 Time (s)
Results – Dynamic paradigm • Dynamic results • Time course of SVV shows gradually increasing underestimation of tilt, just as canal-otolith interaction model predicts • Initial responses are already biased.
Tilt overestimation Tilt overestimation Tilt underestimation Tilt underestimation Results – Static paradigm Results of static tilt LED o 45 tilt RED 10 0 -10 Error in SVV setting (γ), (deg) o 15 tilt 10 0 -10 JG NK MV RV SP TG
Results – Dynamic paradigm Dynamic results Is the dynamic response pattern simply a linear combination of static effects and canal-otolith interaction? SVV = A • Dynamic + B • Static
Results – Dynamic paradigm Fit to dynamic results of 1 subject A=1.3 B=0.8 30o/s & 45o 50o/s & 45o 50o/s & 15o 30 20 10 Error in SVV, γ (deg) 0 -10 -20 -30 0 30 60 90 120 0 30 60 90 120 0 30 60 90 120 Time (s)
Results – Dynamic paradigm Coefficients of all subjects SVV = A • Dynamic + B • Static 2.5 A B 2 1.5 1 0.5 0 -0.5 NK MV RV SP TG JG NK MV RV TG JG SP
Results – Dynamic paradigm Model predicts dynamic SVV 30o/s & 45o 50o/s & 45o 50o/s & 15o Model Prediction 30 Pooled dynamic response 15 Dynamic response Error,γ (deg) 0 -15 -30 0 30 60 90 120 0 30 60 90 120 0 30 60 90 120 Time (s)
Internal Model Tilt Tilt Translation Otoliths Rotation Angular Canals velocity Conclusion • Static effects also play a role in dynamic conditions • Canal-otolith interaction can account for dynamics of tilt percept