Download
1 / 58
590 likes | 753 Views
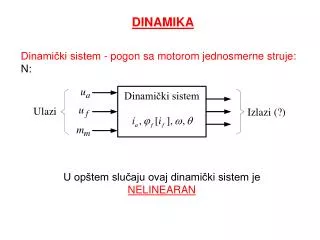
DINAMIKA I UPRAVLJANJE. Vremenski tijek odstupanja uslijed poremećaja naziva se dinamičko ponašanje . Regulirati dinamičko ponašanje znači održavati rad sklopa u blizini nazivnog, bez obzira na poremećaje i kvarove. 1. Struktura upravljačkog sustava.

E N D
Vremenski tijek odstupanja uslijed poremećaja naziva se dinamičko ponašanje. Regulirati dinamičko ponašanje znači održavati rad sklopa u blizini nazivnog, bez obzira na poremećaje i kvarove.
Primjer: Upravljanje bez povratne veze, ali s unaprijednom vezom Zadano:R = 2 , C = 220 F, L = 0,25 mH. Želi se: održati srednju vrijednost izlaznog napona unutar 5 % nazivne vrijednosti od –9 V usprkos pada ulaznog napona od 12 V na 8 V.
Bit unaprijedne veze: Tijek prijelazne pojave se ne može objasniti statičkim modelom.
Zaključci: nadvišenje odziva je veće od željenog 5 %, titraji traju jednako dugo kao i bez unaprijedne veze, titraji se ne mogu objasniti upotrebom statičkog modela.
Primjer: Istosmjerni elektromotorni pogon Komutacijske reaktancije su zanemarive. Želi se: održavati struja armature konstantnom. Pitanje: struktura upravljačkog sklopa?
PI regulator Njegova bit je proporcionalni dio. Jednostavno razmišljanje: treba promijeniti kut upravljanja od nazivne vrijednosti za vrijednost koja je proporcionalna pogrješci Iref–Id. Kada je pogrješka pozitivna regulator smanjuje kut upravljanja, jer se time povećava srednja vrijednost struje Id. Obratno je kada je pogrješka negativna. Integralni dio djeluje na integral pogrješke, on radi sporije i smanjuje pogrješku u ustaljenom stanju zbog kolebanja parametara i nesavršenosti modela.
2. Izbor modela pretvaračkog sklopa Središnja odluka u procesu projektiranja upravljanja. U različitim fazama ili na različitim razinama projektiranja mogu biti potrebni različiti dinamički modeli. Za analizu dinamičkog ponašanja pretvaračkih sklopove korisni su: usrednjeni modeli i modeli u prostoru stanja. Sada ćemo na primjeru pokazati da su dinamički modeli nužni, tj. da se upravljački sklop ne može projektirati na bazi razumijevanja statičkih karakteristika.
Primjer: Problemi upravljanja proporcionalnom povratnom vezom kod uzlazno-silaznog pretvarača. Povratna veza: potrebno je izmjeriti odstupanje izlaznog napona od željene vrijednosti Vo = –9 V i na osnovu tog nesklada promijeniti D od nazivne vrijednosti na
Statička karakteristika: navodi na sljedeći zakon upravljanja: ako je Vopreviše negativan (pogrješka negativna) treba smanjiti D, ako je previše pozitivan treba povećati D.
I što je dobiveno (skok napona napajanja je od 12 V na 8 V, kao i u ranijem primjeru)? Povećanje negativnog h dovodi do titraja. Pozitivni h ne dovodi odmah do katastrofe, čak za pozitivni h sustav može biti i stabilan. Očito, sustav se ne može razumjeti na bazi statičke karakteristike.
Uočite da ovi dijagrami prikazuju vremenski tijek srednje vrijednosti izlaznog napona. Ovako definirana srednja vrijednost odnosi se na jedan trenutak (završetak intervala u kojem se računa srednja vrijednost) i zato se naziva trenutačna srednja vrijednost.
3. Usrednjavanje strujnog kruga Usrednjeni modeli su tradicijski razvijeni za visokofrekvencijske istosmjerne pretvarače. Odgovorit ćemo na pitanja: kako izgraditi električne krugove koji opisuju usrednjeno ponašanje, kako ih linearizirati.
Trenutačna srednja vrijednost varijable Kod mnogih sklopova u prvom redu nas zanimaju srednje vrijednosti napona i struja, a tek onda trenutačne vrijednosti, npr. kod istosmjernih pretvarača, kod istosmjernih elektromotornih pogona, kod PWM-izmjenjivača. Cilj: metoda analize trenutačnih srednjih vrijednosti varijabli strujnog kruga u prijelaznim stanjima.
Usrednjavanje strujnog kruga KZN i KZS vrijede i za trenutačne srednje vrijednosti. Razlog je u tome što su KZN i KZS linearne i vremenski neovisne (LVN) jednadžbe. Otpor Kapacitet Induktivitet
Budući da je: Slijedi:
Recept izgradnje usrednjenog kruga: svi trenutačni naponske i strujne varijable zamjenjuju se trenutačnim srednjim varijablama, svi LVN-elementi ostaju nepromijenjeni. Ostaje pitanje što je sa zamjenom nelinearnih ili vremenski promjenljivih elemenata. O tome kasnije. Očito je da se sklopke na zamjenjuju sklopkama, jer na pristupima sklopke postoji i srednja vrijednost napona i srednja vrijednost struje.
Primjer: Usrednjeni krug reguliranog elektromotornog pogona Valni oblik napona vd.
Usmjerivač s napojnom mrežom zamijenjen je naponskim izvorom; to je moguće, jer je izlazni napon potpuno definiran kutom upravljanja . Sada je lako odgovoriti na pitanje: kako se mijenja trenutačna srednja vrijednost idako se kut upravljanja skokovito smanji?
Primjer: Usrednjeni krug silazno-uzlaznog pretvarača u isprekidanom načinu rada Da li struja kroz diodu opada linearno?
Zašto “minus”? Uočite nelinearnu ovisnost o Vin, D i o Struju diode zamjenjuje naponski upravljani strujni izvor. Ova struja se ponekad naziva injektirana struja.
Trenutačna srednja vrijednost sklopne funkcije Njezina srednja vrijednost pojavljuje u izvodu usrednjene sklopke. Sklopka se zamjenjuje elementom koji na svojim prilazima ima jednake srednje vrijednosti struja odn. napona.
Ili drugi primjer: Shema na slici a) obuhvaća takve pretvarače kao što su i PWM- izmjenjivač i silazni istosmjerni pretvarač. upravljiva sklopna mreža q(t) je sklopna funkcija
Još o sklopnoj funkciji q(t) Kod silaznog istosmjernog pretvarača poprima vrijednosti 1 i 0, a kod PWM-izmjenjivača +1, 0 i –1. Trenutačna srednja vrijednost sklopne funkcije naziva se kontinuirani faktor vođenja. Uočite da d(t) može biti i negativan. Ako se d(t) mijenja obrnuto proporcionalno s Vin iz usrednjenog kruga mogu se potisnuti učinci promjena ulaznog napona (unaprijedna veza). Takva unaprijedna veza uklanja učinke promjena ulaznog napona iz ustaljenog i iz prijelaznog stanja.
Usrednjavanje sklopke Pretpostavke: – mala valovitost, vyz(t) = vC i ix(t) = iL, – spore promjene, se značajno ne promijene od periode do periode, – neisprekidani način rada.
Primjer: Usrednjeni krug uzlazno-silaznog pretvarača u neisprekidanom načinu rada
Uočite da je usrednjeni krug nelinearan, jer strujne i naponske varijable nelinearno ovise o d(t). Ako je d(t) konstantan, krug je linearan i vremenski nepromjenjiv, pa je analiza jednostavna.
A Ako je D = konst. dobiju se transformatorske jednadžbe za ustaljeno stanje. Uvjet IC= 0, strujna jednadžba transformatora daje strujnu transformatorsku jednadžbu.
A Zašto “minus”?
A Uvjet VL= 0, naponska jednadžba transformatora daje naponski transformatorsku jednadžbu.
Nakon dužeg računa dobije se: Prijenosna funkcija jednaka je L-transformatu impulsnog odziva sustava: jer je: Ova prijenosna funkcija se može upotrijebiti za računanje odziva na skokovitu promjenu ulaznog napona samo pod pretpostavkom da je trajanje prijelazne pojave bitno duže od periode usrednjavanja T.
Za razmatrani uzlazno-silazni pretvarač, odziv izlaznog napona na skokovitu promjenu ulaznog napona (bez povratnih veza) je: Vremenska konstanta 2RC iznosi 88 s ili 44 periode, a perioda 2/D 2924 s ili 146 perioda.
Istovrsni račun može se provesti i za unaprijednu vezu, međutim mora se uzeti u obzir da se, pored vin, i D skokovito promijeni na vrijednost koju određuje vin nakon svoje skokovite promijene. Dalje bi se mogli zapitati kako nadomjesni serijski otpor kondenzatora utječe na dinamičko ponašanje.
4. Linearizirani modeli Primjer: Linearizacija kruga uzlazno-silaznog pretvarača u isprekidanom načinu rada Izvedeno je: Ustaljeno stanje:
Izvod modela pokazuje da se D i Vin smiju sporo mijenjati, pa u tom slučaju vrijedi: Neka je ulazni napon konstantan i jednak Vin. Neka se d(t) promijeni: Poremećaje doživljavaju :
Model sklopa za male signale može izravno sugerirati rješenje upravljanja. Očito, ako se paralelno kapacitetu doda otpor, povećava se prigušenje, pa odstupanje brže pada prema nuli. Razumljivo, ne smije se dodati fizički otpor, jer se smanjuje djelotvornost pretvarača. No, ako se proporcionalnom povratnom vezom postigne: učinak je isti kao da se strujni izvor zamijenio vodljivosti:
Proporcionalno-integralno upravljanje ima isti učinak kao zamjena strujnog izvora paralelnim spojem otpora i induktiviteta. Taj induktivitet je uzrok što je ustaljena vrijednost od jednaka nuli, čak i ako para-metri odstupaju i ako su poremećaji konstantni.