Download
1 / 41
440 likes | 796 Views
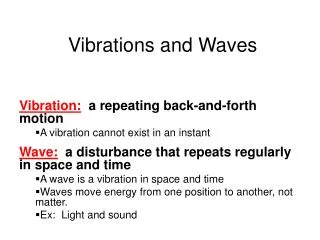
Vibrations and Oscillations. A mass on a spring will oscillate if the mass is pushed or pulled from its equilibrium position. Why?

E N D
Vibrations and Oscillations A mass on a spring will oscillate if the mass is pushed or pulled from its equilibrium position. Why? We saw from the Hooke’s Law experiment that the force of a spring is related to how far the spring is pulled or pushed from equilibrium: Fspring = -kx where the minus simply indicates that if you push in on the spring, the spring pushes out.
Springs The spring constant, k, describes how “stiff” the spring is. A large k indicates that a large force is needed to stretch the spring. But why does the mass oscillate? From Newton’s Second Law, if we ignore other forces like friction or gravity: S F = ma and F = -kx leads to -kx = ma .
Oscillations of Springs -kx = ma This says that if x is positive (spring stretched), the force is negative and hence the acceleration is negative. This will produce a velocity that, if initially zero, will become negative, tending to reduce the positive x. As x approaches zero, the equilibrium position, the force approaches zero and the acceleration will approach zero; but this still leaves a positive velocity!
Oscillations of Springs Now as it passes the equilibrium position, the mass has velocity so it will pass through the equilibrium position and end up with a negative (compressed) position. Here the force becomes positive giving a positive acceleration. This will make the negative velocity less negative, but still negative. Hence the mass will go to an even more negative position, with an even bigger negative force and acceleration that will continue to slow it down until it reaches zero speed.
Oscillations of Springs At this point where the speed is zero, we have a negative (compressed) position which gives a positive force and hence positive acceleration. This acceleration will then cause the speed to increase to a positive value which will cause the mass to move back towards equilibrium. This process continues and we get an oscillation!
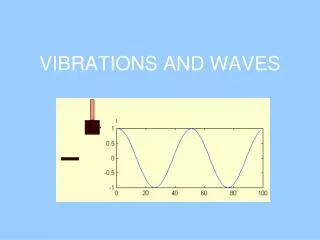
Formulas for Oscillations From the calculus, we can solve -kx = ma (this is a differential equation) -kx = m d2x/dt2 to get: x = A sin(wt + qo) where w = [k/m]1/2. This should appear reasonable: the sine function oscillates (goes up and down in value) just like the mass oscillates! But the sine function needs an angle to operate on! Where is the angle in the problem?
Angles: geometric and phase x = A sin(wt + qo) . The sine function is operating on the quantity: (wt + qo). This expression must be an angle. But what angle? There is no “geometric” angle in the problem because the problem is only in one dimension. Instead, we call this kind of angle a phase angle. A phase angle simply describes where in the oscillation the wave is!
Sine and Phase Angles The crest of the sine wave is located at 90o, the trough at 270o and it crosses zero at 0o, 180o and starts repeating at 360o (or 2p radians).
Phase angle frequency x = A sin() where is a phase angle in an oscillation; changes withtime(goes2radians in time T)so q = wt + qo = (2/T)*t + qo where2/T = = 2pf; and qois simply the phase angle when t=0 (where the oscillation starts at t=0).
Amplitude x = A sin(wt + qo) . The amplitude, A, describes how far up and how far down x goes. Since sine has a maximum value of 1 and a minimum value of -1, A is used to put in units and to give the amplitude of the oscillation.
What does w depend on? x = A sin(wt + qo) . We have seen that w describes how fast the mass oscillates. But what does this oscillation (w) depend on? From solving the differential equation, we get a prediction: w = (k/m) . For stiffer springs and lighter masses, the frequency of the oscillation increases. Note: the Amplitude does NOT affect the frequency!
Oscillations and Energy For masses on springs, we have: Etotal = KE + PE = (1/2)mv2 + (1/2)kx2. We also know that x = A sin(wt + qo) . If we look at how x changes with time, we get the speed. Using v = dx/dt, we get: v = wA cos(wt + qo). Therefore,Etotal = (1/2)mw2A2cos2(wt+qo) + (1/2)kA2sin2 (wt+qo). Note: when sine is maximum, cosine is zero; and when sine is zero, cosine is maximum!
Oscillations and Energy Etotal = (1/2)mw2A2cos2(wt+qo) + (1/2)kA2sin2 (wt+qo). From the above, it looks like Etotal depends on time. Does this violate Conservation of Energy? We saw that w = (k/m) . Substituting this into the first term gives: Etotal= (1/2) kA2cos2(wt+qo) + (1/2)kA2sin2 (wt+qo) = (1/2)kA2 =(1/2) mw2A2, which does NOT depend on time!
The Pendulum In the Oscillations Lab, we will experimentally develop equations to describe the oscillations of a pendulum. In this case, we will have a real geometric angle AND we will have a phase angle. The geometric angle (the angle the pendulum makes with the vertical) oscillates, so we will have: qpendulum = qmax sin(wt+fo) .
The Pendulum In the lab we will investigate what physical parameters the period (T) depends on. (Again, we will have the relations we had for the spring and for circular motion in general: f = 1/T, w=2pf.)
Waves on a string If you wiggle one end of a string (or slinky) that has a tension on it, you will send a wave down the string. Why? We can consider this by looking at Newton’s Second Law:
Waves on a string If we consider the first part of the wave, we see that the Tension on the right has a zero y component, but the Tension on the left is pulling up. Thus, S Fy = Tleft-y + Tright-y > 0. This will cause this part of the string to start moving upwards!
Waves on a string A little later, this part of the string is moving upwards, but now the Tension on the left has less of a y component and the Tension on the right has a bigger negative y component! This will tend to slow this part of the string down!
Waves on a string At the top of the pulse, the wave has slowed to zero, but both the left and right Tensions are pulling down, so there will continue to be a negative y force, and this will cause this part of the string to start moving down.
Wave Equation Starting withSF = ma applied to a small segment of the string, Dm, we get TRy + TLy = (Dm)*a ; m = m / L, so Dm = m*Dx T sin(qR) - T sin(qL) = (m Dx)*a(the minus sign above comes from the fact that the tension on the left is pulling approximately 180o from the right)for small angles, sin(q) tan(q) = y/x T Dsin(q) = T D(y/x) = (m Dx)*a dividing both sides by Dx gives: T D(y/x) / Dx) = = m *a; but a = 2y/t2 , so we finally get the wave equation: T 2y/x2= m2y/t2
Waves on a string By continuing to look at each part of the string, we can understand how the wave can move down the string. Using the calculus, we can solve the differential equation that Newton’s Law gives (the wave equation), and we get: y(x,t) = y(s) where s = x ± vt is a solution: y/x = dy/ds*s/x = dy/ds = y’, and y/t = dy/ds*s/t = v*dy/ds = v*y’ , so that T 2y/x2= m2y/t2 becomes T(y’’) = m(y’’)v2 therefore, y(x,t) = y(x ± vt) as long as v2 = T/ m.
Waves on a String One possible solution that has this form is: y = A sin(kx wt) where v = l/T = lf = w/k. Substituting our answer: y = A sin(kx wt) into the wave equation: T 2y/x2= m2y/t2 gives T (-A sin(kx wt) k2 = m (-A sin(kx wt) w2 or (T/m)1/2 = w/k.
Waves (in general) y = A sin() where is a phase angle in a moving wave, changes with both • time (goes2radians in time T) and • distance (goes 2radians in distance ) so = (2/)*x ± (2/T)*t • where2/T = and • where 2/ = k and so phase speed: v =distance/time = /T = f =/k, and using the result from the previous slide, we have v = (T/m)1/2 .
Waves (in general) • For nice sine waves: y = A sin(kx t + qo) • For waves in general, can break into component sine waves; this is called spectral analysis.
Waves (in general) • sine waves are nice • other types of waves (such as square waves, sawtooth waves, etc.) can be formed by a superposition of sine waves - this is called Fourier Series . This means that sine waves can be considered as fundamental.
Waves on a string In review, we came up with relations for the speed of the wave in terms of the parameters of the wave and in terms of the properties of the medium through which the wave was moving (properties of the string): v = lf = w/k = (Ttension)/m) where m = m/L (mass/length of string).
Power delivered by a wave Each part of a nice sine wave oscillates just like a mass on a spring. Hence it’s energy is that of an oscillating mass on a spring. We saw before that this depended on w2A2. The power delivered by a wave is just this energy per time. The rate of delivery depends on the speed of the wave. Thus the power in the wave should depend on: P w2A2v where means proportional to.
Reflections of Waves Do waves “bounce” off of obstacles? In other words, do waves reflect? We’ll demonstrate this in class with a slinky. There are two cases: when waves bounce off a stiff obstacle, the waves do reflect, but they change phase by 180o; when waves bounce off a loose obstacle, the waves do reflect, but they do NOT change phase.
Interference: Waves on a String When a wave on a string encounters a fixed end, the reflected wavemust interfere with the incoming waveso as to produce cancellation. This means the reflected wave is 180 degrees (or /2) out of phase with the incoming wave at the fixed end. The image below shows a picture of the blue incoming wave and the red reflected wave at one particular instant. At this instant, the two waves add to zero at the right end, but the two troughs near the right end add together! Fixed end
Interference: Waves on a String Below is the same situation, only this time we picture the situation at a time (1/4)T later. Note that the blue incoming wave is at a trough and the red reflected wave is at a crest and so the two cancel at the fixed end as required. Note that at this instant, we get cancellation everywhere! Fixed end
Interference: Waves on a String Below is the same situation, and this time we picture the situation at a time (1/4)T later than the previous, or (1/2)T later than the first. Note that both the blue incident wave and the red reflected wave are at zero at the fixed end, but the two crests near the right end add constructively! Fixed end
Interference: Waves on a String When a wave on a string encounters a freeend, the reflected wavedoes NOT have to destructively interfere with the incoming wave since there is no requirement that the end stays at zero. There is NO phase shift on this reflection. Free end
Interference: Waves on a String Again, we picture the situation at a time (1/4) T later. The incident wave is at a trough and the reflected wave is also at a trough at the free end. Free end
Interference: Waves on a String Below is the same situation, and this time we picture the situation at a time (1/4)T later than the previous, or (1/2)T later than the first. Free end
Below is the situation with two fixed ends spaced 1.625 wavelengths apart (phase difference of 585o which is the same as 225o). • The blue is the incident wave arriving at the right end with a phase of 180o and is reflected. • The red is the first reflected wave from the right end starting with a phase of 180o+180o = 360o which is the same as 0o. The red wave reaches the left end with a phase of 225o and is reflected. • The purple reflected wave starts with a phase of 225o+180o = 405o which is the same as 45o. It reaches the right end with a phase of 45o+225o = 270o and is reflected. • The orange reflected wave starts with a phase of 270o+180o = 450o which is the same as 90o. Fixed end Fixed end
Interference Notice how confused the waves become, and when you start adding them all together, you tend to get cancellation everywhere all the time. Fixed end Fixed end
Standing Waves However, if the difference between the two ends is 1.5 wavelengths, a stable pattern of constructive interference persists, and we have what are called standing waves! Fixed end Fixed end
Standing Waves To create what are called standing waves (we will play with these in the last lab), we need to create constructive interference from both ends. This leads to the following condition:#(l/2) = L , which says: we need an integer number of half wavelengths to “fit” on the Length of the string for standing waves. We can vary the wavelength by either varying the frequency or the speed of the wave: recall that phase speed: v =distance/time = /Tperiod = f . For a wave on a string, recall thatv = lf = (Ttension)/m) where m = m/L.
Standing Waves For stringed instruments (piano, guitar, etc.), the string vibrates with both ends fixed. However, with wind instruments (trumpet, trombone, etc.), we can have the situation where both ends are free and a different situation where one end is free and one end is fixed. • If both ends are free, we get the same resonance condition as for both ends fixed: #(l/2) = L. • If one end is free and the other end is fixed, we get a different condition: #odd(l/4) = L, where #odd is an odd number (1, 3, 5, etc.).
Interference: Waves on a String In general: • When a wave is incident on a SLOWERmedium, the reflected wave is 180 degrees out of phase with the incident wave. • When a wave is incident on a FASTER medium, the reflected wave does NOT undergo a 180 degree phase shift.
Computer Program The last program on Volume 2 is program #0, Waves and Doppler Effect. Although this program is not assigned, it does contain animations in the Introduction that apply to what we just talked about. It also introduces the Doppler Effect.