Download
1 / 32
320 likes | 448 Views
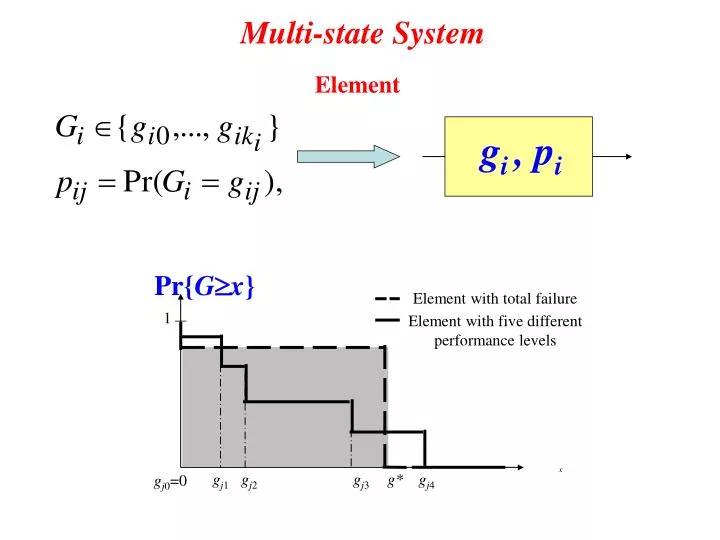
g i , p i. 1. Element with five different performance levels. x. g j 1. g j 2. g j 3. g*. g j 4. g j 0 =0. Multi-state System. Element. Pr{ G x }. Element with total failure. Multi-state System. Combination of Element s. G. G. Gn. G 2. G 1. 1. 1. 2. 3. 2. 3. 1.

E N D
gi , pi 1 Element with five different performance levels x gj1 gj2 gj3 g* gj4 gj0=0 Multi-state System Element Pr{Gx} Element with total failure
Multi-state System Combination of Elements G
G Gn G2 G1 1 1 2 3 2 3 1 1 1 2 3 3 2 2 Multi-state System Structure function G=f(G1,G2,…,Gn) Transmission capacity Transmission time G=f(G1, G2, G3)=min{G1+G2, G3}
G2 G1 gi , pi Gn Multi-state System Generic Model g, p i=1,2,…,n G=f(G1,G2,…,Gn) Acceptability Function F(G,W) (0,1) Pr{G>x} R(W) x W System reliability: R(W)=E(F(G,W))
Average (expected) performance Reliability SYSTEM PERFORMANCE MEASURES E D Expected unsupplied demand Pr{G>x} G R Demand x
G2 Gn G1 SYSTEM PERFORMANCE MEASURES g, p Reliability Average (expected) performance Expected unsupplied demand
pmf of F(G,W): uG(z)=0.6641z4+0.0657z1.5+0.2459z2.5+0.0243z0 W=2 uW(z)=1z2 F(G,W)=1(GW) U(z)= 0.6641z1(42)+0.0657z1(1.52)+0.2459z1(2.52)+0.0243z1(02) R = U’(1) = 0.66411(42)+0.06571(1.52)+0.24591(2.52) +0.02431(02) = 0.6641+0.2459 = 0.91
Types of Multi-state Systems Series systems Processing speed Transmission capacity
Functions in composition operators … Series systems Processing speed Identical elements:
Functions in composition operators Series systems Transmission capacity … Identical elements:
D E(max(w-G,0)) Series systems Performance measures w R E 0 Transmission capacity: Processing speed:
Types of Multi-state Systems Parallel systems Work sharing Processing speed No work sharing Flow dispersion Transmission capacity No flow dispersion
Functions in composition operators Parallel systems Flow dispersion Transmission capacity Flow dispersion n identical elements:
D E(max(w-G,0)) Flow transmission parallel systems Performance measures w R E
Functions in composition operators Parallel systems Processing speed No work sharing No work sharing n identical elements:
D E(max(w-G,0)) Task processing parallel systems Performance measures No work sharing w R E
fser fser fser fpar fser fpar Types of Multi-state Systems Series-parallel systems Generalized RBD method Usystem(z)
Types of Multi-state Systems Bridge systems 1 3 5 2 4 Component ... ... ... Element Transmission capacity Flow dispersion No flow dispersion br(G1, G2, G3, G4, G5) = min{G1, G3}+min{G2, G4} + min{|G1 G3|,|G2 G4|, G5}1((G1 G3)(G2 G4)<0) br(G1, G2, G3, G4, G5) =max{min{G1,G3} min{G2,G4}, min{G1,G5,G4}, min{G2,G5,G3}}
Types of Multi-state Systems Bridge systems Task processing speed No work sharing Work sharing T = min{t1+t3, t2+t4, t1+t5+t4, t2+t5+t3} br(G1, G2, G3, G4, G5) = 1/T =max{ser(G1,G3),ser(G2,G4), ser(G1,G4,G5),ser(G2,G3,G5))} br(G1, G2, G3, G4, G5) =/[(f+G5)+(e+G5)] f = G4, e = G2 if (G2G1) (G3G4) f = G3, e = G1 if (G2G1) > (G3G4) = G1G2+G1G5+G2G5 = G3G4+G3G5+G4G5
Component m Component 1 Component M ... Types of Multi-state Systems MSS with two failure modes ... ... ... ... R=1-0.5(Q0+Qc) Flow transmission (valves) Element Open Task processing (switches) Close
t1 t1 t2 Open t2 Types of Multi-state Systems MSS with two failure modes Close T=max(t1,t2) T=min(t1,t2) Open Close T=min(t1,t2) T=max(t1,t2)
D(I) t w01 w02 w03 w04 w05 w06 w11 w12 w13 w14 w15 w16 unit 3 unit 4 unit 1 unit 2 unit 5 I Types of Multi-state Systems Weighted voting systems - system output (0,1,x) - threshold - rejection weights - acceptance weights d1(I) d2(I) d3(I) d4(I) d5(I) d6(I) - voting units outputs (0,1,x) unit 6 - system input (0,1)
Example of Weighted Voting System Undersea target detection system ?
{ { r Types of Multi-state Systems Sliding window systems n k-out-of-r-from-n: { r
r3=3, w3 r2=6, w2 r1=2, w1 g1g2 g3g4 { r2=5 Types of Multi-state Systems Multiple sliding window systems { r1=3 …Gn G1 …
Types of Multi-state Systems Consecutively connected systems Linear Circular
Types of Multi-state Systems Multi-state networks Single terminal Multiple terminals Tree structure Node states
Types of Multi-state Systems Software systems Software Hardware Input ? Success Failure Output
Types of Multi-state Systems Fault-Tolerant Programming N-Version Programming Recovery Blocks Scheme + Correct Result Version 1 AT - Version 1 M Identical Outputs + Correct Result Version 2 AT Version 2 Correct Result Voter - … … + Version N Failure Correct Result Version N AT - Failure
Types of Multi-state Systems Fault-Tolerant Programming Effect of Versions Sequencing 3-out-of-5 system 5 3 1 3 4 2 2 4 5 1 t2+t4+t5 t1+t3 5 3 3 4 4 2 1 2 5 1 t1+t2+t5 t3+t4
… Types of Multi-state Systems Multiprocessor systems Processing speed S Processing time T=G/S Computational burden G
Types of Multi-state Systems Grid computing services Resource Resource Resource Resource Resource Resource RMS Resource Resource Request for service