Download
1 / 13
130 likes | 270 Views
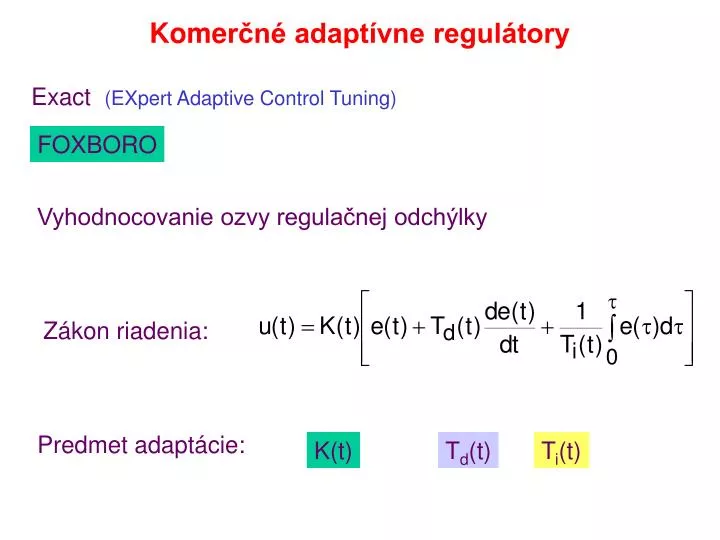
Kome rčné adaptívne regulátory. Exact (EXpert Adaptive Control Tuning). FOXBORO. Vyhodnocovanie ozvy regulačnej odchýlky. Zákon riadenia:. Predmet adaptácie:. K(t). T d (t). T i (t). Detekuje sa tvar ozvy regulačnej odchýlky:. e 1. e 1. e 3. e 3. e 2. e 2. Vplyv poruchy.

E N D
Komerčné adaptívne regulátory Exact (EXpert Adaptive Control Tuning) FOXBORO Vyhodnocovanie ozvy regulačnej odchýlky Zákon riadenia: Predmet adaptácie: K(t) Td(t) Ti(t)
Detekuje sa tvar ozvy regulačnej odchýlky: e1 e1 e3 e3 e2 e2 Vplyv poruchy Skok r(t) t t Index tlmenia: Preregulovanie: 1. Nastavenie K tak, aby: 2. Nastavenie Ti a Td
Zistený začiatok ozvy 1. Extrém zistený 2. Extrém zistený • Extrém nenájdený 2. Extrém nenájdený Výpočet parametrov ozvy nastavenie Výpočet parametrov regulátora Heuristická logika regulátora EXACT Ustálený stav Detekcia 1. extrému Detekcia 2. extrému Detekcia 3. extrému
y u r PID Riadený proces Adaptívny PID s reléovou väzbou Firma: SattControl Autori: Astrom, Häglund Princíp: Vo fáze ladenia sa zapne relé a vyvolajú sa netlmené kmity e
Metóda harmonickej rovnováhy Kritické zosilnenie: A – amplitúda kmitov systému Po ustálení kmitov určíme kca TC Výpočet parametrov regulátora: • jednoduchosť Výhody: • netreba apriorné informácie Nevýhody: • parametre sa určujú na základe veľmi • redukovanej informácie • citlivosť na šumy • potreba rozkmitania systému
Identifikácia modelu kP Ti Td Monitor odozvy r e u y PID regulátor Riadený proces Centum -XL Yokogawa Snímanie charakteristík procesu Výpočet kp, Ti , Td
PID adaptívny algoritmus s monitorovaním zmeny prac. bodu • proces nemusí byť budený prídavným signálom • počas adaptácie sa zobrazujú parametre • adaptácia sa pri malých zmenách vypína Predpokladaný model procesu: Kp, Ti ,,Td K, T, D Cieľ riadenia (OS) Typ procesu (IP)
, Stavy regulátora (STC): • -1 Normálny PID algoritmus. Adaptácia je vypnutá. • 0 Zobrazujú sa nové parametre PID ale nenastavujú sa • 1 Adaptácia je zpanutá. Parametre sa automaticky prestavujú. • 2 Automatický štart. Nastavovanie parametrov PID: Charakteristiky procesu môžu byť:IP = 0 pre statický priebeh IP = 1 pre astatický priebeh
TR aktuálna odozva 95% TR TR
Cieľ riadenia (OS): OS = 0 preregulovanie je 0 OS = 1 preregulovanie do 5% OS = 2 preregulovanie do 10% OS = 2 preregulovanie do 15%
Samočinne nastavujúce sa PID regulátory Dahlinov regulátor Vektor parametrov v identifikácii: Signálny vektor: Pre výpočet parametrov boli odvodené vzťahy:





![Beyond Responsive [18F 2015]](https://cdn4.slideserve.com/7567021/beyond-responsive-dt.jpg)