Download
1 / 1
10 likes | 99 Views
Simulateurs. Afin de pouvoir mettre au point les programmes, nous en testons et réglons certains éléments grâce à des outils de simulation développés par nos soins. Ces simulateurs permettent de recréer l'environnement dans lequel évoluera ensuite le robot. Simulateur de détection d'obstacles

E N D
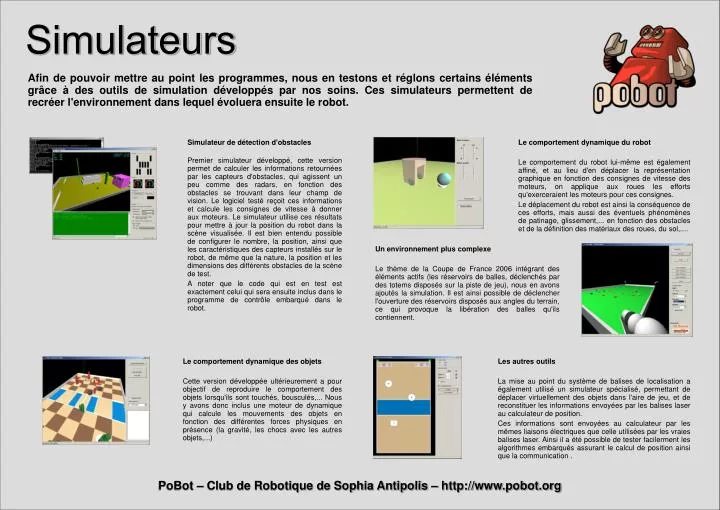
PoBot – Club de Robotique de Sophia Antipolis – http://www.pobot.org Simulateurs Afin de pouvoir mettre au point les programmes, nous en testons et réglons certains éléments grâce à des outils de simulation développés par nos soins. Ces simulateurs permettent de recréer l'environnement dans lequel évoluera ensuite le robot. Simulateur de détection d'obstacles Premier simulateur développé, cette version permet de calculer les informations retournées par les capteurs d'obstacles, qui agissent un peu comme des radars, en fonction des obstacles se trouvant dans leur champ de vision. Le logiciel testé reçoit ces informations et calcule les consignes de vitesse à donner aux moteurs. Le simulateur utilise ces résultats pour mettre à jour la position du robot dans la scène visualisée. Il est bien entendu possible de configurer le nombre, la position, ainsi que les caractéristiques des capteurs installés sur le robot, de même que la nature, la position et les dimensions des différents obstacles de la scène de test. A noter que le code qui est en test est exactement celui qui sera ensuite inclus dans le programme de contrôle embarqué dans le robot. Le comportement dynamique du robot Le comportement du robot lui-même est également affiné, et au lieu d'en déplacer la représentation graphique en fonction des consignes de vitesse des moteurs, on applique aux roues les efforts qu'exerceraient les moteurs pour ces consignes. Le déplacement du robot est ainsi la conséquence de ces efforts, mais aussi des éventuels phénomènes de patinage, glissement,... en fonction des obstacles et de la définition des matériaux des roues, du sol,.... Un environnement plus complexe Le thème de la Coupe de France 2006 intégrant des éléments actifs (les réservoirs de balles, déclenchés par des totems disposés sur la piste de jeu), nous en avons ajoutés la simulation. Il est ainsi possible de déclencher l'ouverture des réservoirs disposés aux angles du terrain, ce qui provoque la libération des balles qu'ils contiennent. Le comportement dynamique des objets Cette version développée ultérieurement a pour objectif de reproduire le comportement des objets lorsqu'ils sont touchés, bousculés,... Nous y avons donc inclus une moteur de dynamique qui calcule les mouvements des objets en fonction des différentes forces physiques en présence (la gravité, les chocs avec les autres objets,...) Les autres outils La mise au point du système de balises de localisation a également utilisé un simulateur spécialisé, permettant de déplacer virtuellement des objets dans l'aire de jeu, et de reconstituer les informations envoyées par les balises laser au calculateur de position. Ces informations sont envoyées au calculateur par les mêmes liaisons électriques que celle utilisées par les vraies balises laser. Ainsi il a été possible de tester facilerment les algorithmes embarqués assurant le calcul de position ainsi que la communication .