Download
1 / 32
320 likes | 546 Views
Player Stage Gazebo. A robotic research and development environment. Rex Wong CCNY Robotic Lab. What are the components?. Player ( installed on robots or remote computers ) Device server that provides a powerful, flexible interface to a variety of sensors and actuators

E N D
Player Stage Gazebo A robotic research and development environment Rex Wong CCNY Robotic Lab
What are the components? • Player (installed on robots or remote computers) • Device server that provides a powerful, flexible interface to a variety of sensors and actuators • Stage (installed on remote computers only) • 2D, multi-robot simulator • Large number of robots or sensors • Gazebo (installed on remote computers only) • 3D, dynamic, multi-robot simulator • few number of robots or sensors
User Program PCI Camera Sensory Data Acquisition USB Laser Serial Planner Sonar … Odometry Motor Command Generation Desired Motion Motors Serial Canbus … Robot Programming
Player User Program PCI Camera Sensory Data Acquisition USB Laser Serial Planner Sonar … Odometry Motor Command Generation Desired Motion Motors Serial Canbus … Player: a device server
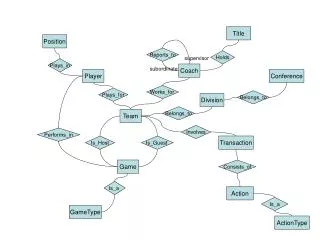
Player Server Device driver Interface TCP/IP Player Client Library C/C++ C# Java Tcl Python Ruby Lisp Octave Data SICK LMS 200 laser sicklms200 SICK PLS Configuration laser sickpls User Program Command position Pioneer p2os position segwayrmp Segway IPC position Khepera khepera Client / Server Model
Player Client Library C/C++ C# Java Tcl Python Ruby Lisp Octave Player Server Robot Hardware Player Server Stage Simulator User Program Gazebo Simulator Player Server Hardware Abstraction
Pre-Installation Procedure • Player/Stage works only in Linux Operating System. • Distributions: Red-hat, Fedora, Debian, SUSE... • Our choice: Ubuntu Linux --- user-friendly with GUI • Pre-installation: careful hard drive partition • Post-installation: add necessary software such asC/C++ compiler (gnu C++/G++), devhelp, devhelp-common, dmsetup ...etc. • Familiarize yourself with the directory tree of Ubuntu. • Use “Synaptic package manager” to find out what are missing in order to run or compile programs. • Note: Linux OS is case-sensitive just as Unix system. • Must get used to work with console-based environment.
Player/Stage Installation (1) First, download free copy from the following web site: http://playerstage.sourceforge.net
Player/Stage Installation (2) • Go to “Download” hyperlink and click. It will bring you to the download sites as ...
Player/Stage Installation (3) • Download the latest version of Player, Stage, and Gazebo on the desktop of your Linux computer. • Unzip the relative compressed files by double-clicking it. • All the unzipped files will go to their destined directories.i.e., all Player files will go to /player-2.0.5/ directory and all Stage files will go to /stage-2.0.4/ directory • Then, change directory to /player-2.0.5/ and type:./configure (it will take a while to compile Player) • After complete compilation, type: make • If no error, then continue to type: make install • Sometimes, you need to type “sudo” to override the requirement for administrative password. • Once this is done, repeat the same thing for Stage. • For some reason if you induce errors which prevents it from complete, check the error messages to find out what needed to be done or what dependent file has been left out.
Structure Tree after installation 2 copies of Player/Stage are stored separately in the following directory trees Root
Conclusion • Easy to use • High fidelity to the existing hardware • Easy to access hardware by driver interface and plug-in • Easy to develop your own codes • Many template to custom-make codes • Porting codes from Stage to robot is effortless. Little modification needed.