Download
1 / 17
180 likes | 337 Views
System Level Design Review. P10029: Control Enhancements for Air Muscle Biomimetic Hand. October 16, 2009. Customer: Dr. Lamkin-Kennard Faculty Guide: Ed Hanzlik Team Members: Zach Wessner, Jaci Tylkowski, Alex Bean, Mark Wood, Tuan Tran, Kevin Mudrak. Summary.

E N D
System Level Design Review P10029: Control Enhancements for Air Muscle Biomimetic Hand October 16, 2009 Customer: Dr. Lamkin-Kennard Faculty Guide: Ed Hanzlik Team Members: Zach Wessner, Jaci Tylkowski, Alex Bean, Mark Wood, Tuan Tran, Kevin Mudrak
Summary • P10029 is a continuation project • Physical system was built by P09023 • Final design will be integrated into Dr. Lamkin-Kennard’s pneumatically driven scalable robotic hand devices • Controls system is the focus • Maintenance and repair only of the physical system • Virtual and Physical prototypes • Virtual system modeled in SolidWorks and both controlled by LabView
Critical Dates • System Level Design Review – 10/16/09 • Detailed Design Review – 11/06/09 (3weeks) • Virtual Concept Selected • Physical Prototype benchmarked • Controls (Physical & Virtual) designed • Project Management Review – 11/20/09 (5weeks) • Controllable virtual system • Controllable physical system • Calibration Plan / DAT Plan
Customer Needs • Build kinematic modelusing SolidWorks/Cosmos Motion Builder • 3-D Closed loop feedback for both hand and model. • Drive kinematic modelusing the inputs from the mechanical hand. • Virtual and Physical Models output displacements • Quantitative analysis comparing displacements of mechanical hand to model.
Voice of the Engineer • Top 3 Metrics based on the HOQ • Functionality • Accuracy • Repeatability
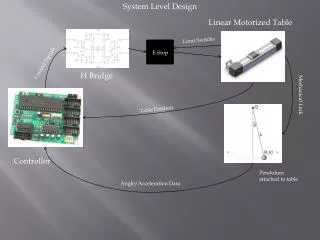
Inputs to Labview GUI -% of Travel -3 Space Location -System Selection (Physical/Virtual) -Coded Movements -Absolute/Relative Joint Position System Level Architecture LabView GUI Physical System Programming Virtual System Programming Physical Programming Function -convert input into time to open/close valves -Convert DAQ voltages into position outputs Virtual Programming Function -convert GUI input into 3 space for virtual model -Convert sensor output to 3 Space Location Legend Inputs Outputs
Physical Architecture FILL/VENT RELAYS FILL/VENT RELAYS 20 20 20 MUSC LES 20 MUSCLES 20 20 10 x 10 x
Controls Architecture [ 20, 1 ] [ 20, 1 ] [ 20, 1 ] [ 20, 1 ]
NI LabView 2009 w/ SoftMotion SolidWorks 2009 Premium SoftMotion Functions Trajectory Generator Communication Interface (Scan Engine) Motion Simulation Virtual Architecture User Input: [SolidWorks Assembly]Motion Analysis System Output: [SolidWorks Assembly]Visual Motion of Assembly User Input: [LabView Front Panel]Coordinate MoveSingle Axis Move System Output: [LabView Front Panel]Displacement Feedback
Virtual Proof of Concept • Goal: • LabView 2009 SoftMotion: meets objectives? • Educate team for full-scale model • System architecture • Plan • Simplified SolidWorks model • Research & tutorials for LabView • Develop LabView control (single axis) • Functional Evaluation • Joint design, movement, controls scheme, feedback • Iterative (adding complexity)
Virtual Proof of Concept SolidWorks Model 1 DOF Simulated Joint
Virtual Proof of Concept • Issues / Risks: • Scan Engine Period [5ms or 10 ms] / Deployment • Virtual Controls Scheme differs from Physical • Virtual Error = 0?
Physical System Risks/Issues • What are we doing? • Kevin/Tuan • WIP • Document the bitching about the physical system • USB 2.0
Concept Generation and Selection • Concepts generated for measurement of displacement • Measurement of error was also considered
Decisions/Action Items • Are our resources sufficient? • Physical System • Computer • Software