Download
1 / 4
60 likes | 225 Views
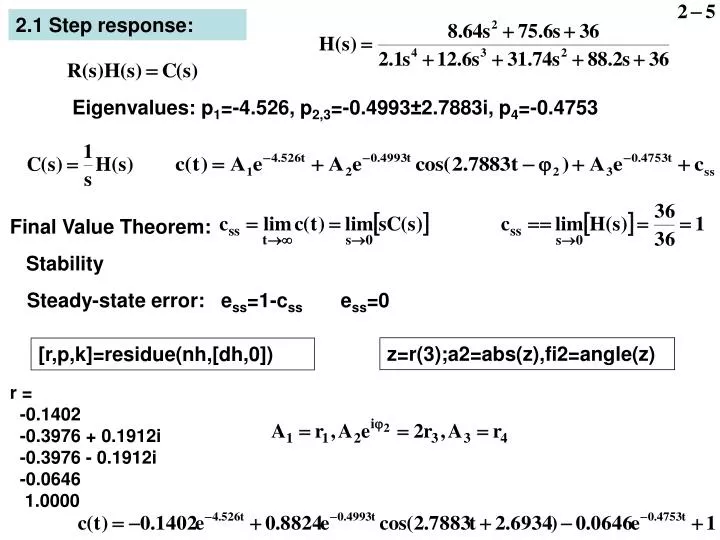
2.1 Step response:. Eigenvalues: p 1 =-4.526, p 2,3 =-0.4993 ± 2.7883i, p 4 =-0.4753. Final Value Theorem:. Stability. Steady-state error: e ss =1-c ss e ss =0. z=r(3);a2=abs(z),fi2=angle(z). [r,p,k]=residue(nh,[dh,0]). r = -0.1402 -0.3976 + 0.1912i

E N D
2.1 Step response: Eigenvalues: p1=-4.526, p2,3=-0.4993±2.7883i, p4=-0.4753 Final Value Theorem: Stability Steady-state error: ess=1-css ess=0 z=r(3);a2=abs(z),fi2=angle(z) [r,p,k]=residue(nh,[dh,0]) r = -0.1402 -0.3976 + 0.1912i -0.3976 - 0.1912i -0.0646 1.0000
Design criteria for control systems: Stability Steady-state error ess=1-css→ 0 Sensitivity [css]d→ 0 Overshoot , typical % 5, damping ratio 0.7 Settling time tss (depending on application) Homework Pr. 02-01 (b), Pr. 02-03 (b) In first stage P control,stability, ess, [css]d If necessary PI control, eleminates steady-state errror If necessary PD control, decreases overshoot If necessary PID control, meets the all design criteria
Critical damping ratio Step response of second order systems ωn : undamped natural frequency ξ: Damping ratio clc,clear wn=1;ksi=0.2; tp=2*pi/wn;dt=tp/20;tson=tp/ksi; t=0:dt:tson;w=wn*sqrt(1-ksi^2); a=wn/w;sigma=ksi*wn;fi=-acos(ksi)-pi/2; c=a*exp(-sigma*t).*cos(w*t-fi)+1; plot(t,c)
tr : Rise time td : Delay time ts : Settling time (%5) cmax : Peak value, tmax: Peaktime, cmax-css: Maximum overshoot css : Steady-state value, 1-css : Steady-state error