Download
1 / 51
510 likes | 682 Views
Mikrokontrolery PIC. Wykład 2 2 /51. Rodzina PIC MID Range. PIC - MidRange - Architektura 3 /51.

E N D
Wykład 2 2/51 Rodzina PIC MID Range
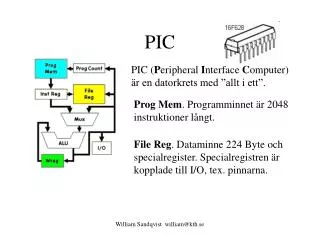
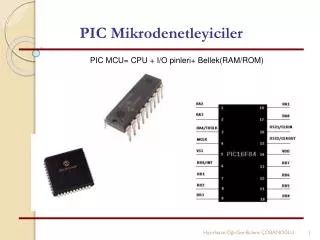
PIC - MidRange - Architektura 3/51 • PIC16C84 charakteryzuje się następującymi cechami: • architektura Harvard RISC; • 8-bitowe ALU; • 1024x14 EEPROM programu; • 15 rejestrów specjalnych; • 36B SRAM+64B EEPROM (żywotność 106 cykli) danych; • 35 rozkazów o kodzie 14-bitowym, wykonywane w 1 cyklu (wyjątek: rozkazy skoku i wywołania); • 8-poziomowy stos sprzętowy;
PIC - MidRange - Architektura 4/51 • Cechy c.d.: • proste (bezpośredni, pośredni i względny) tryby adresowania danych i rozkazów; • 4 źródła przerwań; • 13 linii we/wy o obciążalności 20/25mA; • 8-bitowy timer/licznik z 8-bitowym programowalnym preskalerem; • interfejs SPI do programowania w trybie ISP; • wbudowany układ resetu od zasilania, z timerem resetu; • watchdog z wbudowanym własnym oscylatorem RC;
PIC - MidRange - Architektura 5/51 • Cechy c.d.: • tryb oszczędzania energii SLEEP; • częstotliwość taktowania 0-10MHz (czas cyklu: 400ns - ); • wbudowany oscylator RC z programowalną kalibracją; • możliwość wyboru rodzaju generatora taktu (wewn/zewn, RC/kwarc/prostokąt); • bity ochronne programu; • szeroki zakres napięć pracy: 2,0 - 6,0 V.
PIC - MidRange - Architektura 6/51 Struktura blokowa układu PIC16C84
PIC - MidRange - Architektura 7/51 Organizacja pamięci programu PC - 13-bitowy, jego młodszy bajt jest widoczny jako PCL Przestrzeń adresowa pamięci programu Mid Range: 000..1FFFh (8k×14b słów). Przy pamięci programu o pojemności P<8kW, PC adresuje ją modulo P. Podzielona na 4 strony po 2kW.
13 12 0 PC 13 0 strona 0 adres restartu 0000h dostępnaw 16C84 przestrzeń adres obsł. przerwań 0004h 03FFh 0400h strona 1 strona 2 strona 3 07FFh 0800h dostępnaw Mid-range przestrzeń 0FFFh 1000h 17FFh 1800h 1FFFh PIC - MidRange - Architektura 8/51 Organizacja pamięci programu - c.d.
ID 2000h 2001h 2002h 2003h 2007h ID ID ID CONFIG PIC - MidRange - Architektura 9/51 Organizacja pamięci programu - c.d. Komórki o adresach 2000h..200Fh to tzw. pamięć konfiguracyjna: 2000h, 2001h, 2002h i 2003h są przeznaczone na numer identyfikacyjny układu (bity 3..0). 2007h - rejestr konfiguracyjny CONFIG
PIC - MidRange - Architektura 10/51 Organizacja pamięci programu - c.d. Rejestr konfiguracyjny CONFIG: CP - bit ochronny kodu programu: gdy =1 - ochrona wył., =0 - ochrona włącz. PWRTE - bit włączający power-up timer: gdy =1 - włącz., =0 - wył. WDTE - bit włączający watch-dog: gdy =1 watch-dog włączony, =0 - wyłączony FOSC1, FOSC0 - bity wybierające źródło sygnału taktującego: 00 - LP zewn. oscylator kwarcowy o f=32-400kHz; 01 - XT zewn. oscylator kwarcowy o f=0,4-4MHz; 10 - HS wewn. oscylator RC ok. 4MHz albo zewn. oscylator kwarcowy 4-10MHz; 11 - RC zewn. oscylator RC o f do 4MHz
PCL 12 8 7 0 PC: bajt z ALU PCLATCH: PIC - MidRange - Architektura 11/38 Modyfikacja i odtwarzanie PC 1. Przez rozkaz zapisujący rejestr PCL 1B wartością Dowolny rozkaz arytmetyczno-logiczny lub przesłania,dla którego wskazano PCL jako rejestr docelowy
sprzętowy stos 8 x 13b szczyt stosu adres powrotu szczyt stosu PCL 12 8 7 0 PC: 11b z kodu rozkazu CALL PCLATCH: PIC - MidRange - Architektura 12/38 Modyfikacja i odtwarzanie PC 2. Przez rozkaz wywołania procedury CALL
PCL 12 10 0 PC: 11b z kodu rozkazu GOTO PCLATCH: PIC - MidRange - Architektura 13/38 Modyfikacja i odtwarzanie PC 3. Przez rozkaz skoku GOTO
sprzętowy stos 8 x 13b szczyt stosu PCL 12 8 7 0 PC: PCLATCH: PIC - MidRange - Architektura 14/38 Modyfikacja i odtwarzanie PC 4. Przez rozkazy powrotu z procedury RETURN, RETLW, RETFIE
sprzętowy stos 8 x 13b szczyt stosu PIC - MidRange - stos 15/51 • Stos: • sprzętowy; • 8-poziomowy (8 13-bitowych rejestrów); • wskaźnik stosu nie jest dostępny; • działa jak rejestr cyrkulacyjny - 9-ty zapis na stos spowoduje zamazanie pierwszego wpisu;
STATUS: 7 6 0 FSR: kod rozkazu: 7 6 0 IRP RP1,RP0 00 01 10 11 00h 30h 7Fh 80h 0B0h 0FFh 100h 17Fh 180h 1FFh bank #0 bank #1 bank #2 bank #3 PIC - MidRange - Architektura 16/51 Organizacja pamięci danych obszar niedostępny w 16C84
PIC - MidRange - Architektura 17/51 Organizacja pamięci danych - blok rejestrów np. 16C84
PIC - MidRange - blok rejestrów specjalnych 18/51 szare pola - bity nie używane; - - niezaimplementowany przy odczycie 0
PIC - MidRange - blok rejestrów specjalnych 19/51 szare pola - bity nie używane; - - niezaimplementowany przy odczycie 0
STATUS: IRP RP1 RP0 /TO /PD Z DC C PIC - MidRange - blok rejestrów specjalnych 20/51 C - flaga przeniesienia/pożyczki DC - flaga przeniesienia połówkowego Z - flaga sygnalizująca zerowy wynik operacji /PD - flaga sygnalizująca przejście w stan uśpienia: 0 - po rozkazie SLEEP 1 - po resecie od zasilania lub wykonaniu rozkazu CLRWDT /TO - flaga przepełnienia licznika watch-doga: 0 - po resecie od zasilania, po wykonaniu rozkazów CLRWDT lub SLEEP 1 - gdy przepełnił się licznik watch-doga RP1,RP0 - bity wyboru aktywnego banku rejestrów przy adresowaniu bezpośr.: 00 - bank #0 (00..7Fh), 01 - bank #1 (80h..0FFh), 10 - bank #2 (100h..17Fh), 11 - bank #3 (180h..1FFh) IRP - bit wyboru banku rejestrów przy adresowaniu pośrednim: 0 - bank #0 i #1 (00..0FFh); 1 - bank #2 i #3 (100h..1FFh). IRP i RP1 są nieużywane w PIC16C84
natychmiastowy kod rozkazu operand andlw 130 Tryby adresowania operandów - bajtów Tryb adresowania operandów - bitów blokrejestrów • bezpośredni kod rozkazu bit f bcf 10,3 PIC - MidRange - tryby adresowania 22/51
rejestrowy /bezpośredni kod rozkazu f rejestry/SRAM 7b RP1 RP0 addwf 10 2b wybór banku 9b Rf: operand PIC - MidRange - tryby adresowania 23/51 Tryby adresowania operandów - bajtów - cd.
rejestry/SRAM • rejestrowy pośredni kod rozkazu f* f*=00h,80h clrf INDF FSR: IRP 7b 2b wybór banku 9b operand PIC - MidRange - tryby adresowania 24/51 Tryby adresowania operandów - bajtów - cd.
PIC - MidRange 25/51 Generator taktu
PIC - MidRange 26/51 Przetwarzanie rozkazów Q1 - dekodowanie rozkazu, inkrement PC Q2 - pobranie argumentów Q3 - wykonanie rozkazu Q4 - zapamiętanie wyniku i koniec pobierania nast. rozkazu
wykonanie 1 pobranie 2 wykonanie 2 pobranie 3 wykonanie 3 pobranie 4 odrzucenie 4 pobranie x PIC - MidRange 27/51 Przetwarzanie rozkazów - cd. 1. MOVLW 55h 2. MOVWF PORTB 3. CALL PROC1 4. BSF PORTA,BIT3 ............ x. PROC1: ... pobranie 1 wykonanie x
PIC - MidRange 28/51 Obwód resetu
PIC - MidRange 29/51 Obwód resetu - działanie układu BOR (Brown Out Reset)
PIC - MidRange 30/51 Stan rejestrów specjalnych po resecie, zależnie od przyczyny: - - niezaimplementowany, przy odczycie 0; x - wartość nieokreślona; u - wartość niezmieniona; q - wartość zależna od przyczyny resetu;
PIC - MidRange 31/51 Stan rejestrów specjalnych po resecie, zależnie od przyczyny: - - niezaimplementowany, przy odczycie 0; u - wartość niezmieniona; x - wartość nieokreślona; q - wartość zależna od przyczyny resetu;
PIC - MidRange 32/51 • Praca z obniżonym poborem prądu • tryb włącza się rozkazem SLEEP; • główny oscylator wyłącza się • następuje wstrzymanie wykonywanie programu • linie portu pozostają b.z. • zerowany jest licznik WDT i jego postskaler • zużycie prądu spada do ok. 1μA • bity: /PD=0, /TO=1 • Wyjście z trybu power down może być wywołane: • zewnętrzny reset na /MCLR - restart programu od 0000 • reset od WDT time-out - wznowienie programu od nast. rozkazu • niezamaskowanym przerwaniem - j.w. i wejście w obsługę przerwania
PIC - MidRange - przerwania 33/51 • System przerwań PIC16C84: • 4 źródła przerwań: zewnętrzne RB0/INT od przepełnienia TMR0 od zmiany stanu wejść PORTB7..4 od końca zapisu do EEPROM • wspólny wektor obsługi - od adresu 004h; • maskowalny - indywidualne flagi maskowania + flaga globalna GIE; • zablokowany po RESET; • powrót z procedury obsługi rozkazem RETFIE, ustawiającym także GIE=1; • przerwania mogą „budzić” mikrokontroler z trybu SLEEP; • przerwania mają swe flagi sygnalizacyjne.
PIC - MidRange - przerwania 34/51 Rejestr kontrolny przerwań PIC16C84: GIE - globalna flaga zezwolenia na przerwania; EEIE - zezwolenie na przerwanie od EEPROM; T0IE - zezwolenie na przerwanie od TMR0; INTE - zezwolenie na przerwanie zewnętrzne; RBIE - zezwolenie na przerwanie od zmiany PORTB; T0IF - flaga przerwania od TMR0; INTF - flaga przerwania zewnętrznego; RBIF - flaga przerwania od PORTB; EEIF - flaga przerwania od EEPROM, umieszczona na 4 bicie EECON1.
PIC - MidRange - przerwania 35/51 Struktura procedury obsługi przerwania: 1. Przechowanie rejestrów W, STATUS, PCLATCH (i innych) w zarezerwowanych rejestrach banku #0. 2. Rozpoznanie przyczyny przerwania (z powodu wspólnego wektora dla 4 możliwych źródeł). 3. Obsłużenie wybranego przerwania. 4. Skasowanie jego indywidualnej flagi zgłoszenia przerwania (np. rozkazem BCF). 5. Odtworzenie stanu rejestrów (innych), PCLATCH, STATUS, W z zarezerwowanych rejestrów w banku #0. 6. Powrót z procedury obsługi przerwania rozkazem RETFIE (odblokowującym ponownie system przerwań).
PIC - MidRange - przerwania 36/51 Struktura procedury obsługi przerwania: Przykład przechowania stanu rejestrów na początku procedury obsługi przerwania: MOVWF temp_W MOVF STATUS,W MOVWF temp_STATUS MOVF PCLATCH,W MOVWF temp_PCLATCH Przykład odtworzenia stanu rejestrów MOVF temp_PCLATCH,W MOVWF PCLATCH MOVF temp_STATUS,W MOVWF STATUS MOVF temp_W,W
PIC - MidRange - peryferia 37/51 Port A • port ma 5 linii: RA0..RA3 - zwykłe we/wy; RA4 - we/wy albo wejście impulsów dla TMR0; • rejestr TRISA decyduje o kierunku (ustawione bity TRIS oznaczają wejście 3-stanowe); • linie RA0..RA3 mają diody zabezpieczające dołączone do masy i zasilania
PIC - MidRange - peryferia 38/51 Port A • linia RA4 ma diodę zabezpieczającą dołączoną tylko do masy
PIC - MidRange - peryferia 39/51 Port B • port ma 8 linii: RB0 - we/wy albo wejście przerwania zewn. /INT0 RB1..RB3 - zwykłe we/wy; RB4..RB7 - zwykłe we/wy z możliwością przerwania od zmiany stany • rejestr TRISB decyduje o kierunku (ustawione bity TRISB włączają opornik podciągający)
PIC - MidRange - peryferia 40/51 Port B • linie RB6 i RB7 są wykorzystywane przy szeregowym programowaniu układu
PIC - MidRange - peryferia 41/51 Timer • 8-bitowy licznik z preskalerem/postskalerem wspólnym z watchdogiem; • zlicza cykle masz. (fOSC/4) albo zewn. impulsy wejściowe (na T0CKI); • jego przepełnienie powoduje ustawienie flagi T0IF; • widoczny jako rejestr TMR0; • sterowanie pracą - poprzez bity rej. OPTION.
PIC - MidRange - peryferia 42/51 Watchdog • bazuje na własnym oscylatorze RC; • przepełnia się po 18ms (ale zależy to od temp. i nap.zasil.:7-33ms); • by uzyskać dłuższe czasy należy użyć postskalera; • przy normalnej pracy WDT Time-out powoduje RESET, a przy pracy w uśpieniu - obudzenie μC; • watchdog zeruje się rozkazem CLRWDT albo SLEEP; • watchdog można zablokować tylko w fazie programowania układu.
PIC - MidRange - peryferia 43/51 Watchdog
PIC - MidRange - peryferia 44/51 Wykorzystanie preskalera/postskalera przez timer i watchdog wsp. podziału preskalera: 1/2 1/4 1/8 1/16 1/32 1/64 1/128 1/516 - dla TMR0 postskalera 1/1 1/2 1/4 1/8 1/16 1/32 1/64 1/128 - dla WDT
PIC - MidRange - peryferia 45/51 • Pamięć EEPROM • dostępna poprzez rejestry EEDATA i EEADR; • dodatkowo rejestry sterujące EECON1 i EECON2 (wirtualny); • zapis polega na przeprogramowaniu pojedynczego bajtu; • czas zapisu do 10ms/B, kontrolowany przez lokalny timer i zależny od temperatury i napięcia pracy; • koniec zapisu powoduje ustawienie flagi EEIF, która może być zgłoszeniem przerwania;
PIC - MidRange - peryferia 46/51 Odczyt EEPROM 1. Wpisanie adresu do EEADR. 2. Ustawienie bitu RD w EECON1. 3. Odczyt zawartości rejestru EEDATA. Przykład programu: BCF STATUS,RP0 ; Bank 0 MOVLW CONFIG_ADDR ; MOVWF EEADR ; adres EEPROM do odczytu BSF STATUS,RP0 ; Bank 1 BSF EECON1,RD ; odczyt komorki EEPROM BCF STATUS,RP0 ; Bank 0 MOVF EEDATA,W ; W = EEDATA
PIC - MidRange - peryferia 47/51 Zapis do EEPROM 1. Wpisanie adresu do EEADR. 2. Wpisanie danej do EEDATA. 3. Zablokowanie przerwań INTCON.GIE=0. 4. Odblokowanie wpisu do EEPROM EECON.WREN=1. 5. Zapis do EECON2 kolejno: 55h i 0AAh. 6. Włączenie zapisu do EEPROM EECON1.WR=1. 7. Odblokowanie przerwań INTCON.GIE=1. Przykład programu: BSF STATUS,RP0 ; wybór banku #1 BCF INTCON,GIE ; wyłączenie przerwań BSF EECON1,WREN ; odblokowanie zapisu MOVLW 55h MOVWF EECON2 ; wpisanie 55h MOVLW AAh MOVWF EECON2 ; wpisanie AAh BSF EECON1,WR ; start zapisu BSF INTCON, GIE ; odblokowanie INTs.
PIC - MidRange - lista rozkazów 48/51 rozszerzenie względem BaseLine kkkkkkkk - dana 1-bajtowa fffffff - adres w banku rejestrów/pamięci wskazujący na F d - bit wskazujący lokalizację wyniku: d=0 - wynik do W, d=1 wynik do Fs - adres skoku, wywołania procedury x - wartość dowolna (0/1)