Download
1 / 12
120 likes | 146 Views
Solenoid Magnetic Field Mapping. Introduction Mapper machine Mapper software - Simulation - Corrections - Fitting Future work. Paul S Miyagawa University of Manchester. The Principals. Martin Aleksa (project coordinator) Marcello Losasso (engineering design)

E N D
Solenoid Magnetic Field Mapping • Introduction • Mapper machine • Mapper software • - Simulation • - Corrections • - Fitting • Future work Paul S Miyagawa University of Manchester
The Principals • Martin Aleksa (project coordinator) • Marcello Losasso (engineering design) • Felix Bergsma (Hall probes + motors) • Heidi Sandaker (DAQ) • Steve Snow (NMR probes + software) • John Hart + Paul S Miyagawa (software) ATLAS ID alignment meeting
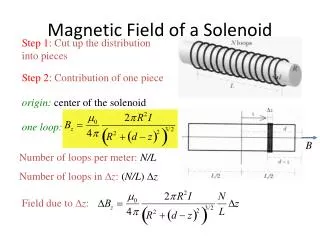
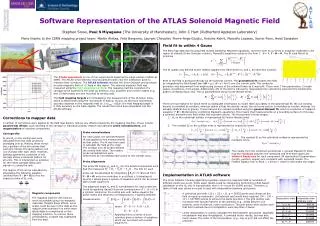
Magnetic Field Shape • z-component dominant near centre of solenoid • r-component more important near ends of coil • Field from magnetised iron only 4.5% of total • Bending power defined as Bz – Br z / r ATLAS ID alignment meeting
Objectives • Momentum scale will be dominant uncertainty in W mass measurement • Momentum accuracy depends on ∫r(rmax - r)Bzdr, so field at intermediate radii is most important • Need to measure bending power integral of magnetic field to 0.05% accuracy • Field B may be described by a scalar potential satisfying Laplace’s equation, 2 = 0 • Sufficient to measure B on the surface of a cylinder (including the ends) surrounding the tracker ATLAS ID alignment meeting
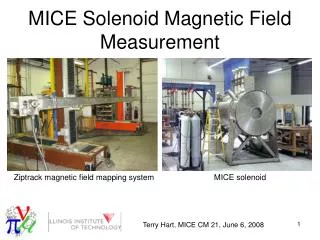
Field Mapper Machine • Two propeller arms which rotate in phi • Carriage slides in z along rails • Up to 25 Hall probes on each arm on both sides • Cross-checks between probes on opposite sides of same arm • Also have cross-checks between arms • Machine measures field inside solenoid before ID installed • Also have 4 NMR probes permanently fixed to solenoid to set overall scale ATLAS ID alignment meeting
Field Mapper Software • Convert raw data to physical units • Correct for time drifts in solenoid current • Correct for time drifts in individual Hall probes • Convert to a regular grid • Fit data with two methods: geometrical fit and Fourier-Bessel parametrisation • Use fits to correct normalization and alignment of Hall probes ATLAS ID alignment meeting
Simulation of Raw Data • Field calculated from solenoid of expected dimensions • Magnetisation due to magnetic material from outside Inner Detector • Random walk with time for solenoid current and Hall probe measurements • Random errors for each measurement ATLAS ID alignment meeting
Correction for Current Drift • Average B-field of 4 NMR probes used to calculate “actual” solenoid current • Scale all measurements to a reference current (7600 A) • Effect of drift in current removed • Calibration capable of coping with any sort of drift ATLAS ID alignment meeting
Correction for Hall Probe Drift • Mapping machine regularly returns to fixed calibration positions • Near coil centre to calibrate Bz • Near coil end for Br • No calibration of B • Each channel is calibrated to a reference time (beginning of run) • Scaling factors from calibration points used to determine scalings for measurements between calibrations ATLAS ID alignment meeting
Geometrical Fit • Sum of simple fields known to obey Maxwell’s equations • Long-thin coil (5 mm longer, 5 mm thinner than nominal) • Short-fat coil (5 mm shorter, 5 mm fatter) • Four terms of Fourier-Bessel series (for magnetisation) • Use Minuit for 2 fit to data • Fit gives information about position, shape, etc of coil ATLAS ID alignment meeting
Fourier-Bessel Fit • General fit able to describe any field obeying Maxwell’s equations • Uses large number of parameters obtained by direct calculation • Calculate Fourier terms from Bzon outer cylinder • Fit cosh(λz) terms to ends of cylinder • Fit Br to find z-independent component of field • Poor fit indicates measurement errors rather than incorrect model ATLAS ID alignment meeting
Future Plans • Simulate other effects • Geometrical misalignments • Mechanical deformations • Systematic measurement errors • Readout errors, e.g., missing measurements • Mapper machine scheduled to take data in late February 2006 • Add magnetisation due to magnetic materials in Inner Detector • Deliver final field map on a cylindrical lookup grid • Need to link ID field map to other B-field maps ATLAS ID alignment meeting